
Objectif principal :
• Simulation pour le développement et l'évaluation de radars ECCM
• Tests et vérification de radars ECCM
• Tests et évaluation d'équipements militaires électroniques.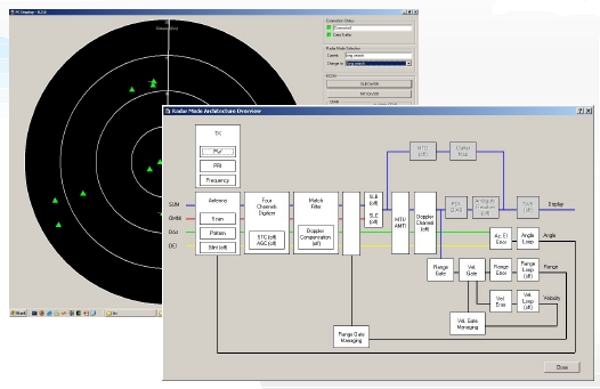 Capacités :
Capacités :
• Simulation radar de modèles radar définis par l'utilisateur. L'utilisateur définit ses propres modèles radar en programmant le GRS via une interface graphique intuitive de haut niveau. Une interface de programmation C/C++ de bas niveau est également disponible pour des applications spécifiques.
• Programmation complète via l'environnement logiciel fourni et les bibliothèques radar de haut niveau.
• Capacité ultra-large bande couvrant l'intégralité de la bande passante utilisée par les systèmes radar.
• Enregistrement de données microscopiques et macroscopiques pour l'analyse post-simulation.
Plateformes de simulation :
• Radars terrestres
• Radars aéroportés et navals
• Autodirecteur de missiles
• Radars de conduite de tir
Types de radars :
• Recherche 2D (longue portée - courte portée)
• Recherche 3D (longue portée - courte portée)
• Radar de poursuite
• Radar TWS FCR et radar de guidage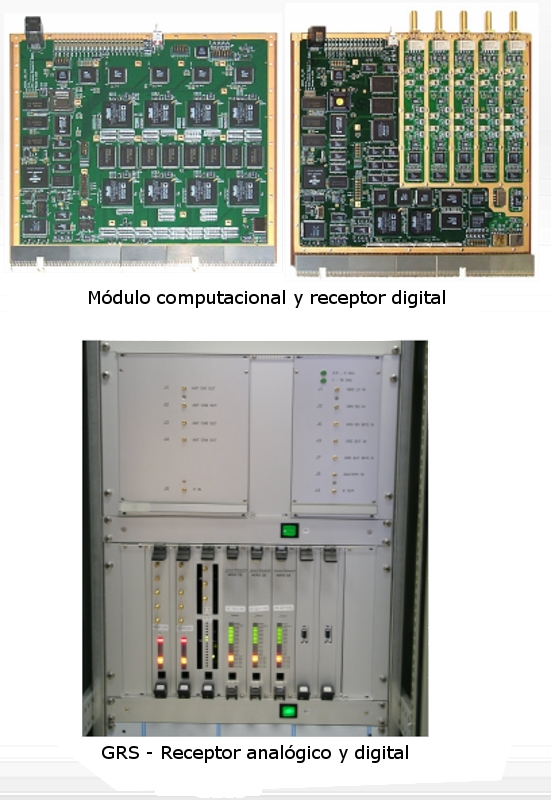 Spécifications principales :
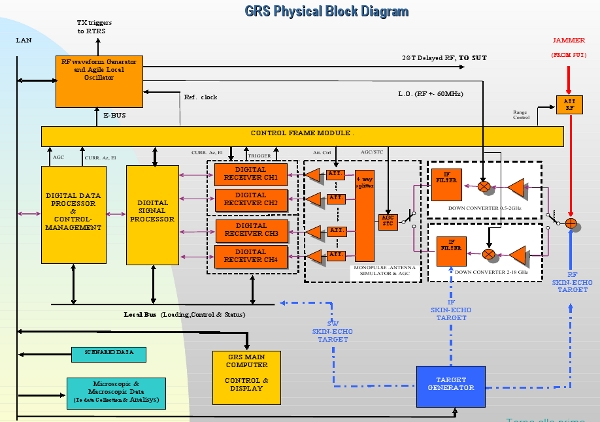
Spécifications principales :
• Couverture de fréquence : 0,5-18 GHz
• Bande d’agilité de fréquence : 500 MHz
• Récepteur : Front-étage analogique avec 4 canaux FI
• Récepteur numérique 4 canaux - CAN 14 bits. Plage dynamique instantanée étendue
• Traitement du signal : filtre combiné FPGA, bibliothèque complète d’algorithmes de traitement radar implémentés par DSP à virgule flottante
• Traitement des données : DSP à virgule flottante
• Contrôle et communications : PowerPC embarqué - Ethernet rapide
Affichage radar :
- Ordinateur personnel, MS-Windows 2000/XP
- Indicateur de position plan
- Indicateur de distance et d’altitude
- Domaine d’application A
- Domaine d’application B
- Domaine d’application C
Antenne :
• Diagramme d’antenne défini par l’utilisateur (lobe principal et lobes secondaires)
• Monopulse : SUM, Laz.LEl, Omni
• Balayage électronique, Frescan
• Parrot, COSRO
• Balayage sectoriel, balayage raster
• Balayage circulaire
Bibliothèque radar
• Filtre combiné (Barker, biphasé et quadriphasé, CHIRP)
• Contrôleur TX (y compris RP)
• MTI, AMTI, MTD
• Flash cible
• SLB et SLC
• Canal Doppler
• PDI/CFAR, TWS, TAS
• Boucles de poursuite : distance, angle, vitesse
• Résolution d’ambiguïté






