
Grâce à une technologie de réception de synchronisation GPS bien conçue, les utilisateurs du GPS bénéficient d'une synchronisation extrêmement précise grâce aux horloges atomiques embarquées à bord des satellites GPS. Cette synchronisation coordonnée permet aux récepteurs adjacents de s'aligner sur la même référence temporelle. Les horloges atomiques spatiales du système GPS sont synchronisées par l'Observatoire naval des États-Unis (USNO). L'USNO effectue des mesures continues avec le Bureau international des poids et mesures (BIPM), l'organisme international de normalisation basé à Paris et chargé du maintien du temps universel, afin de garantir la coordination du temps avec le reste du monde. Ce temps universel coordonné, ou « absolu », est plus communément appelé UTC – Temps universel coordonné. Bien que le GPS, développé et maintenu par le département de la Défense des États-Unis, ait été la première constellation de satellites de positionnement, de navigation et de synchronisation (PNT) déployée, plusieurs systèmes mondiaux de navigation par satellite (GNSS) sont désormais utilisés dans le monde entier pour la PNT. Parmi les autres systèmes GNSS, on peut citer Galileo (UE), GLONASS (Russie), BeiDou (Chine), QZSS (Japon) et IRNSS (Inde).
Avec l'évolution des technologies sans fil, de la 2G à la 5G, les architectures de synchronisation réseau ont évolué en parallèle. Alors que les réseaux d'accès radio distribués (RAN) 2G/3G utilisaient des récepteurs de synchronisation GPS intégrés aux macrocellules, les réseaux 5G s'orientent vers un modèle plus centralisé et/ou pondéré où le GPS sert de source d'horloge réseau pour la synchronisation distribuée. Ces architectures
se sont développées en trois phases distinctes. La première phase, la synchronisation physique ou au niveau des paquets, était conçue pour les réseaux de fréquences, avec un déploiement GPS local sur la tour de la station de base du RAN distribué (DRAN) pour les applications TDD. La deuxième phase a introduit des sources GPS plus centralisées, la synchronisation étant acheminée par paquets vers des groupes d'unités de bande de base (BBU). Les deux premières phases utilisaient des liaisons de synchronisation dédiées entre les BBU et les radios. La troisième phase étendra les protocoles de synchronisation par paquets directement aux unités radio, sans recourir à une synchronisation propriétaire et avec des exigences GPS réduites au niveau des stations de base DRAN. Avec l'introduction des concepts d'Open RAN en 5G, les fonctions BBU seront classées en centralisées (CU) et distribuées (DU), évoluant vers des fonctions virtualisées et basées sur serveur qui n'auront plus besoin d'être incluses dans le chemin de synchronisation.
Un enjeu technique majeur motive la migration d'une architecture de synchronisation GPS distribuée vers une architecture de synchronisation réseau basée sur le protocole PTP (Precision Time Protocol), la version télécommunications du protocole de synchronisation IEEE 1588 sur Ethernet. La première repose exclusivement sur des récepteurs GNSS, tandis que la seconde introduit le concept de combinaison des technologies de récepteur GNSS et d'horloge maître PTP. Le problème de synchronisation le plus fréquent dans les communications sans fil est l'interférence radio co-canal. Le déploiement d'un récepteur GPS sur un site cellulaire, lorsque celui-ci suit correctement les satellites, permet une allocation optimale des créneaux horaires de transmission. Ceci, à son tour, empêche les radios fonctionnant sur des fréquences adjacentes ou proches de s'interférer entre elles. Dans un groupe de radios à couverture partiellement superposée, si un récepteur GPS tombe en panne ou cesse de fonctionner correctement, la radio qui y est connectée interférera avec les radios adjacentes en raison d'une dégradation de la synchronisation ou d'une accumulation d'erreurs de phase. Cette dégradation de la synchronisation est très rapide car ces radios utilisent des oscillateurs économiques et peu performants (l'un des objectifs de conception des radios étant la réduction des coûts par l'utilisation de composants moins performants).
Pour éviter les interférences, dès que la synchronisation commence à se dégrader, la radio doit être mise hors service ou les services affectés immédiatement. Pour atténuer ce type de problème, un service de synchronisation basé sur un protocole PTP peut être déployé. Dans ce cas, les radios du cluster sont synchronisées sur une horloge maître PTP dotée d'un récepteur GPS intégré. Si le GPS de l'horloge maître PTP tombe en panne ou rencontre des problèmes de suivi, les radios synchronisées sur cette horloge restent en phase avec les radios adjacentes et ne subissent aucune interférence. Des oscillateurs de haute qualité peuvent être utilisés sur l'horloge maître PTP pour maintenir l'alignement temporel avec l'UTC pendant de longues périodes, et des solutions de secours basées sur le protocole PTP peuvent être intégrées à l'architecture pour garantir la traçabilité temporelle avec l'UTC en cas de panne. Cette approche de synchronisation en réseau avec une horloge maître PTP est une solution très résiliente et économique qui offre l'avantage supplémentaire de l'alignement de phase du groupe radio en cas de panne GPS. Elle permet également un déploiement GNSS centralisé, où la sécurité et une bonne visibilité vers la constellation de satellites peuvent être optimisées.
Phase 1 : GPS distribué, récepteurs de synchronisation GPS intégrés aux sites macrocellulaires pour les applications de synchronisation CPRI.
Dans cette application, la source de synchronisation est un récepteur GPS intégré à l’unité de base de batterie (BBU), située à proximité de la tête radio (RH), généralement à la base de la cellule. La BBU récupère la synchronisation du récepteur GPS et la transmet à la RH via une fibre optique de quelques mètres grâce à l’interface radio publique commune (CPRI), comme illustré sur la figure A.
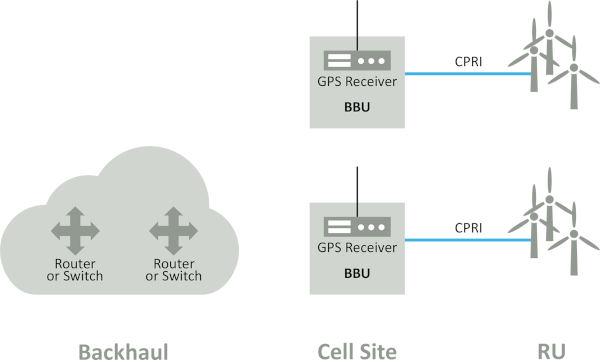 Figure A. Cette figure illustre un récepteur de synchronisation GPS intégré à l'unité de base de commutation (BBU) et constitue un exemple d'architecture de synchronisation GPS distribuée au sein d'une architecture DRAN. La synchronisation est assurée de la BBU vers la radio via la liaison CPRI.
Figure A. Cette figure illustre un récepteur de synchronisation GPS intégré à l'unité de base de commutation (BBU) et constitue un exemple d'architecture de synchronisation GPS distribuée au sein d'une architecture DRAN. La synchronisation est assurée de la BBU vers la radio via la liaison CPRI.
Phase 2 : Services de synchronisation basés sur le réseau source GPS et les horloges maîtres PTP aux points d'agrégation des clusters radio pour les applications de synchronisation CPRI.
Dans cette application, la BBU est située à distance de la tête radio distante (RH). Les BBU sont généralement regroupées en hubs appelés emplacements RAN centralisés (cRAN), qui servent de points d'agrégation pour les clusters RH. La source de temps peut être un récepteur GPS situé dans le hub cRAN, le signal GPS étant acheminé de l'antenne vers les récepteurs intégrés aux BBU. Alternativement, le récepteur GPS peut être combiné avec une horloge maître PTP, auquel cas un service de synchronisation PTP est fourni aux esclaves PTP de la BBU. Une fois la synchronisation rétablie par la BBU à partir du flux PTP ou du récepteur GPS, elle la transmet via la liaison CPRI aux têtes radio distantes (RRH). La liaison CPRI dans les architectures de service 3G et 4G a une limite de distance d'environ 17 km. Voir la figure B ci-dessous.
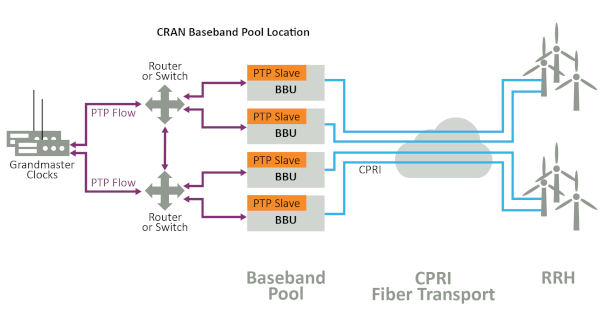 Figure B. Ce schéma représente un maître PTP comme source de synchronisation réseau pour un groupe radio, transférant l'heure d'un esclave PTP de l'unité de stockage de base (BBU) au groupe radio via la liaison CPRI.
Figure B. Ce schéma représente un maître PTP comme source de synchronisation réseau pour un groupe radio, transférant l'heure d'un esclave PTP de l'unité de stockage de base (BBU) au groupe radio via la liaison CPRI.
Phase 3 : Services de synchronisation réseau à partir de la source GPS ; les horloges du maître PTP sont synchronisées aux points d'agrégation du groupe radio pour les applications de synchronisation Ethernet.
La 5G nécessitera une densification du réseau radio et des fréquences plus basses et plus hautes que la 4G, impliquant une conception de synchronisation plus rigoureuse afin d'éviter une augmentation des interférences co-canal entre les radios. Parallèlement, la BBU est désagrégée en deux fonctions, l'unité distribuée et l'unité centralisée, qui peuvent être virtualisées, et la synchronisation basée sur CPRI est transférée vers PTP sur Ethernet directement au niveau des radios. Ceci entraînera un changement majeur dans les architectures de synchronisation : le GPS sera nécessairement déplacé vers les points d'agrégation du groupe radio et le PTP deviendra omniprésent sur l'ensemble du réseau. Une telle architecture nécessitera un déploiement GPS robuste et résilient au cœur du réseau, ainsi qu'un recours accru au protocole PTP pour assurer la synchronisation avec les unités radio 5G (RU) et la sauvegarde et la protection systématiques des horloges GPS.
Il est indéniable que les services 5G s'appuieront de plus en plus sur l'ingénierie PTP pour garantir la résilience et la synchronisation déterministe du réseau. À mesure que les architectures Open RAN gagneront en popularité et seront adoptées pour les déploiements 5G, les flux de synchronisation PTP s'achèveront au niveau des radios 5G, et l'unité distribuée (DU) n'aura plus besoin de faire partie de la chaîne de synchronisation entre l'horloge maître et la radio 5G. Ceci est illustré dans la figure C ci-dessous.
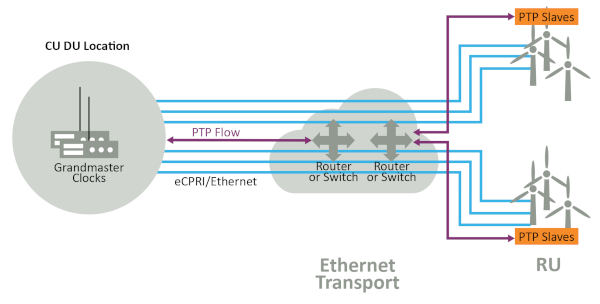 Figure C. Cette illustration représente une horloge maître PTP qui assure le transfert de temps en utilisant le protocole PTP directement vers les esclaves PTP sur les radios 5G.
Figure C. Cette illustration représente une horloge maître PTP qui assure le transfert de temps en utilisant le protocole PTP directement vers les esclaves PTP sur les radios 5G.
Résumé :
La 5G introduit des changements majeurs qui touchent presque tous les aspects de l’architecture des réseaux mobiles sans fil, notamment les fréquences radio utilisées, le transport des données radio I/Q, l’architecture de transport et la synchronisation du réseau. La dépendance au GPS, observée dans les systèmes 3G et 4G, cède la place à une synchronisation point à point (PTP) en raison de nouvelles exigences en matière de sécurité et de fiabilité, de la nécessité d’une synchronisation extrêmement précise et garantie pour les radios 5G sans visibilité directe avec les systèmes satellitaires, et de la préférence des opérateurs pour un alignement de phase garanti et le contrôle des services de synchronisation critiques.
Une synchronisation plus déterministe et rigoureuse, permettant des services haut débit omniprésents et permanents, sera la marque de fabrique des réseaux 5G.
Auteur : Jim Olsen, ingénieur d’applications techniques senior chez Microchip TechnologyInc.






