
Dans le secteur automobile, une tendance majeure de la conception de l'intelligence distribuée est l'utilisation croissante d'architectures zonales. Au lieu de dédier des calculateurs électroniques (ECU) à des fonctions spécifiques et de les relier via Ethernet ou un bus de terrain traditionnel comme le CAN, les constructeurs automobiles consolident les applications sur un nombre réduit de systèmes sur puce (SoC) hautes performances pouvant être affectés à plusieurs applications.
Dans les architectures zonales, les tâches exécutées par chaque application sont réparties entre les SoC. Par exemple, un nœud de stockage peut enregistrer les données d'instrumentation relatives au fonctionnement et aux mouvements du véhicule, ainsi que le contenu multimédia que les occupants souhaitent regarder ou écouter pendant le trajet. Toutes les communications sont gérées par des passerelles zonales qui garantissent un haut niveau de sécurité entre les différentes applications, empêchant ainsi les applications d'infodivertissement d'accéder aux fonctions de commande du moteur, de la direction ou du système de freinage.
Une architecture similaire émerge dans les systèmes industriels. Au lieu que chaque machine-outil soit une unité autonome communiquant avec les autres via un bus de terrain à faible bande passante comme Profibus, les machines sont connectées par Ethernet haut débit. Ceci permet la transmission de données vidéo riches et d'autres données de capteurs vers des systèmes de calcul en périphérie pour traitement. Les applications d'IA exécutées sur ces systèmes peuvent rapidement déterminer si les machines-outils fonctionnent correctement ou si des ajustements sont nécessaires pour compenser les variations de température ou autres conditions.
Le défi posé par ces architectures zonales réside dans la garantie que ces implémentations distribuées atteignent les performances temps réel requises. En automatisation industrielle, les boucles de contrôle sont généralement conçues pour attendre les mises à jour des capteurs à un rythme constant. Elles peuvent développer des instabilités et perdre en précision de positionnement si les mises à jour et les relevés des capteurs attendus par les algorithmes de contrôle sont retardés au-delà de la fenêtre de traitement. La machine est alors contrainte d'utiliser des données probablement obsolètes et ne reflétant plus la réalité physique. Cette latence imprévisible impacte également l'expérience utilisateur dans l'environnement automobile. Les flux de données peuvent interférer au point de provoquer des gels d'image pour les occupants du véhicule. L'impression générale est alors celle d'un système incapable de suivre le rythme.
Une solution consiste à augmenter la bande passante disponible en migrant vers des versions Ethernet plus rapides. Cependant, cette solution s'avère généralement insuffisante. Le problème réside dans le principe du « meilleur effort » de la norme Ethernet de base : tout nœud disposant d'un paquet prêt à être envoyé peut accéder au réseau et bloquer toute autre activité sur ce segment jusqu'à la fin de l'envoi. Cette architecture remonte à la conception de nombreux contrôleurs Ethernet classiques. Ces derniers disposent de simples tampons pour la mise en file d'attente des paquets, sans distinction de type de trafic. Une commande prioritaire, encapsulée dans un paquet court, peut ainsi facilement être contrainte d'attendre l'envoi d'une ou plusieurs longues trames vidéo avant d'être autorisée à entrer sur le réseau. Ce comportement a été étudié par Toshiba sur une plateforme de référence afin de démontrer l'impact de l'imprévisibilité du réseau sur les applications dans les systèmes automobiles et industriels.
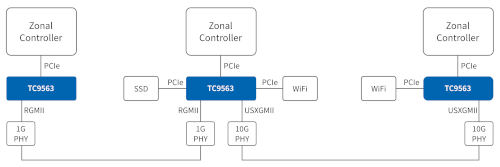
Dans le banc d'essai créé par les ingénieurs de Toshiba, des contrôleurs Ethernet haut débit, compatibles avec les interfaces réseau 1 Gbit/s et 10 Gbit/s, sont connectés à un SoC invité exécutant un code applicatif afin de simuler le comportement de différents cas d'utilisation attendus dans les environnements d'automatisation industrielle et automobile.
Une conception de référence similaire a également permis de démontrer une latence et une gigue limitées avec l'Ethernet haut débit dans ces mêmes environnements.
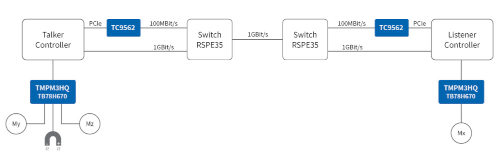
Les tests effectués par Toshiba sur ces conceptions de référence ont montré comment l'utilisation du protocole Ethernet IEEE 802.1 conventionnel peut entraîner un retard significatif d'un faible pourcentage de paquets nécessitant une livraison prévisible, avec des conséquences potentiellement graves pour les applications temps réel. Dans les cas où le trafic à faible criticité consomme relativement peu de bande passante (moins de 1 Mbit/s sur un réseau 1 Gbit/s), le délai de propagation du trafic à haute criticité, comme les paquets transportant les commandes de moteur, a été mesuré jusqu'à 60 µs lors de l'expérience, où les paquets étaient transférés de l'émetteur au récepteur en trois sauts via deux commutateurs. Avec un trafic de fond important et de faible priorité, consommant jusqu'à 840 Mbit/s de bande passante, le délai de propagation maximal a été multiplié par plus de sept, atteignant près de 440 µs.
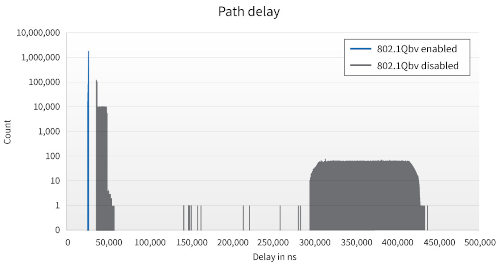
La distribution des délais de propagation est devenue fortement bimodale dans ces conditions : de nombreux paquets ont subi des délais supérieurs à 300 µs, même si une grande partie a atteint sa destination en moins de 60 µs. Lors de tests simulant les effets de ces délais dans un contexte industriel, où les paquets arrivant après l'échéance prévue étaient rejetés plutôt que d'être utilisés pour fournir des données potentiellement erronées à une boucle de contrôle, il en a résulté une incapacité à assurer un déplacement fluide et à atteindre les positions de destination programmées.
L'ajout de la technologie TSN (Time-Sensitive Networking) à la norme Ethernet permet aux équipementiers et aux intégrateurs d'utiliser le réseau haut débit pour les applications multimédias et temps réel. Ces normes incluent l'IEEE 802.1AS, le protocole gPTP (Generalized Precision Time Protocol), qui définit le comportement de synchronisation et de temporisation d'Ethernet dans les environnements TSN, et la norme IEEE 802.1Qbv, qui apporte des améliorations permettant l'envoi du trafic selon une planification stricte.
Le gPTP permet aux périphériques d'un réseau Ethernet de s'accorder sur une heure locale commune avec une précision inférieure à la microseconde et de prendre en compte les délais sur le chemin réseau les reliant. Grâce à cette référence temporelle commune, le gPTP permet la planification des paquets et la modélisation temporelle afin de garantir la livraison des paquets critiques dans un délai connu.
Le planificateur temporel de l'IEEE 802.1Qbv divise les fenêtres de transmission en cycles de durée fixe. Au sein de chaque cycle, différents intervalles de temps peuvent être attribués à un ou plusieurs des huit niveaux de priorité de l'IEEE 802.1Q, et les paquets affectés à ces niveaux bénéficient d'une utilisation exclusive du réseau pendant cet intervalle.
Toshiba a conçu ses bancs d'essai autour de contrôleurs Ethernet implémentant les fonctionnalités gPTP et IEEE 802.1Qbv afin d'observer l'impact de ces techniques sur des tâches logicielles industrielles et automobiles représentatives. Alors que le délai de propagation dans une configuration basée sur un protocole traditionnel variait de 50 µs à 430 µs, la distribution temporelle des paquets, grâce aux fonctionnalités gPTP et IEEE 802.1Qbv, a été réduite à une distribution normale beaucoup plus étroite, centrée sur 25,5 µs, avec une gigue de seulement 0,3 µs. Ceci a permis un contrôle précis de tous les axes de la machine-outil, sans perte de positionnement.
 Grâce à leur prise en charge des protocoles gPTP, IEEE 802.1Qav, IEEE 802.1Qbv et d'autres éléments clés pour le contrôle en temps réel, les TC9562 et TC9563 constituent des composants essentiels à la conception de systèmes de contrôle industriels et automobiles fiables. Le TC9562 prend en charge l'Ethernet 1 Gbit/s, tandis que le TC9563 étend la capacité réseau à deux ports, tous deux capables de supporter des débits de données de 10 Gbit/s. Outre ces performances Ethernet haut débit, ces deux dispositifs intègrent des fonctionnalités qui optimisent les communications avec les SoC hôtes multicœurs via des interfaces PCIe. Le TC9563 implémente les fonctionnalités Gen3 ainsi que la virtualisation d'E/S à chemin unique (SR IOV), une fonctionnalité qui améliore les performances des logiciels exécutés sous un hyperviseur.
Grâce à leur prise en charge des protocoles gPTP, IEEE 802.1Qav, IEEE 802.1Qbv et d'autres éléments clés pour le contrôle en temps réel, les TC9562 et TC9563 constituent des composants essentiels à la conception de systèmes de contrôle industriels et automobiles fiables. Le TC9562 prend en charge l'Ethernet 1 Gbit/s, tandis que le TC9563 étend la capacité réseau à deux ports, tous deux capables de supporter des débits de données de 10 Gbit/s. Outre ces performances Ethernet haut débit, ces deux dispositifs intègrent des fonctionnalités qui optimisent les communications avec les SoC hôtes multicœurs via des interfaces PCIe. Le TC9563 implémente les fonctionnalités Gen3 ainsi que la virtualisation d'E/S à chemin unique (SR IOV), une fonctionnalité qui améliore les performances des logiciels exécutés sous un hyperviseur.
Dans les environnements d'automatisation automobile et industrielle, la combinaison de performances en temps réel et de communications à large bande passante est devenue essentielle. L'intégration des améliorations Ethernet de TSN dans des dispositifs tels que les TC9562 et TC9563 de Toshiba garantit aux intégrateurs de systèmes et aux équipementiers les outils nécessaires au déploiement de réseaux temps réel à large bande passante au sein des véhicules et des systèmes industriels de pointe.


