


- Jueves, 07 Septiembre 2023
Los sectores de automatización industrial y automoción de hoy en día tienen un elemento en común: la rápida digitalización que es posible gracias a la disponibilidad de silicio de alto rendimiento. La inteligencia artificial (IA) y el aprendizaje automático se utilizan para aumentar el control tradicional con funciones más avanzadas. La clave de muchas de estas arquitecturas radica en su uso de inteligencia y control distribuidos que requieren la capacidad de mover grandes cantidades de datos no solo de manera rápida sino también predecible.
En el ámbito de la automoción, una tendencia clave en el diseño de inteligencia distribuida es el uso creciente de arquitecturas zonales. En lugar de dedicar unidades de control electrónico (ECU) a funciones específicas y vincularlas mediante Ethernet o un bus de campo tradicional como CAN, los fabricantes de vehículos están consolidando aplicaciones en una cantidad menor de SoC de alto rendimiento que se pueden asignar a múltiples aplicaciones.
En las arquitecturas zonales, las tareas que implementan cada aplicación se distribuyen entre los SoC. Por ejemplo, un nodo de almacenamiento puede capturar tanto datos de instrumentos de las operaciones y movimientos del vehículo como el contenido multimedia que los ocupantes quieren ver o escuchar mientras viajan. Todas las comunicaciones están mediadas por puertas de enlace zonales que imponen alta seguridad entre las diferentes aplicaciones, de modo que las aplicaciones de información y entretenimiento no obtengan acceso a las funciones de control en los sistemas de motor, dirección o frenos.
Una arquitectura similar está apareciendo en los sistemas industriales. En lugar de que cada máquina herramienta sea una unidad independiente que se comunica con otras a través de un bus de campo de bajo ancho de banda como Profibus, las máquinas están conectadas mediante Ethernet de alta velocidad de datos. Esto brinda la capacidad de enviar video y otros datos de sensores enriquecidos a sistemas informáticos edge para su procesamiento. Las aplicaciones de IA que se ejecutan en estos sistemas informáticos edge pueden determinar rápidamente si las máquinas herramienta funcionan correctamente o si es necesario realizar cambios para compensar la temperatura u otros cambios en las condiciones.
El desafío con tales arquitecturas zonales es garantizar que estas implementaciones distribuidas puedan lograr el rendimiento en tiempo real requerido. En la automatización industrial, los lazos de control suelen estar diseñados para esperar actualizaciones de los sensores a un ritmo constante. Pueden desarrollar inestabilidades y perder precisión de posicionamiento vital si las actualizaciones y las lecturas del sensor que esperan los algoritmos de control se retrasan más allá de la ventana de procesamiento. La máquina se ve efectivamente obligada a usar datos que probablemente estén desactualizados y que ya no representan la realidad física. La latencia impredecible también afecta a la experiencia del usuario en el entorno automotriz. Los flujos de datos pueden interferir entre sí hasta el punto de que los ocupantes del automóvil experimenten estancamientos en el video. Y la percepción general será la de un sistema que no puede seguir el ritmo.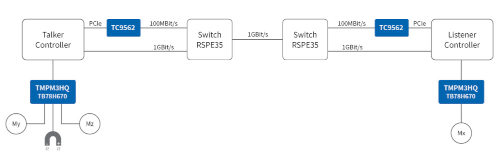
Una respuesta es aumentar el espacio libre moviéndose a formas de Ethernet de mayor velocidad. Pero esto generalmente demostrará ser insuficiente. El problema radica en el principio de mejor esfuerzo del estándar Ethernet base: cualquier par con un paquete listo para enviar puede acceder a la red y bloquear otras actividades en ese segmento de red hasta que finalice. Este enfoque arquitectónico se remonta al diseño de muchos controladores Ethernet convencionales. Tienen buffer simples para poner en cola paquetes en espera que no diferencian entre tipos de tráfico. Un comando de alta prioridad encapsulado en un paquete corto puede forzarse fácilmente a esperar a que se envíen uno o más cuadros de video largos antes de que se le permita ingresar a la red. Este comportamiento ha sido investigado por Toshiba en una plataforma de referencia destinada a mostrar cómo las aplicaciones en los sistemas automotrices e industriales se ven afectadas por la imprevisibilidad en la red.
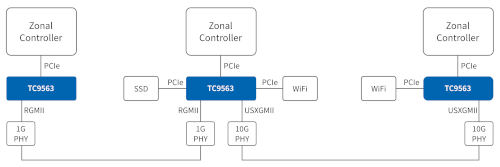
En el banco de pruebas creado por los ingenieros de Toshiba, los controladores Ethernet de alta velocidad, capaces de admitir interfaces de red de 1 Gbps y 10 Gbps, están cada uno conectado a un SoC huésped que ejecuta el código de las aplicaciones para simular el comportamiento de varios casos de uso esperados en los entornos de automoción y de automatización-industrial.
Un diseño de referencia similar también sirvió como demostración de latencia limitada y baja fluctuación con Ethernet de gran ancho de banda en entornos de automatización industrial.
Las pruebas de Toshiba en estos diseños de referencia han demostrado cómo el uso del conjunto de protocolos Ethernet IEEE 802.1 convencional puede provocar que un pequeño porcentaje de los paquetes que necesitan una entrega predecible se retrasen considerablemente, con efectos potencialmente graves en las aplicaciones en tiempo real. En los casos en que el tráfico de baja criticidad consume relativamente poco ancho de banda, menos de 1 Mbps en una red de 1 Gbps, se midió que el retraso en la ruta del tráfico de alta criticidad, como los paquetes utilizados para transportar comandos de control de motores, era de hasta 60 µs en el experimento, donde los paquetes se transfirieron del hablante al oyente en tres saltos a través de dos switches. Con mayores cantidades de tráfico de fondo de baja prioridad, que consume hasta 840 Mbps de ancho de banda, el retraso máximo de la ruta creció más de siete veces hasta casi 440 µs.
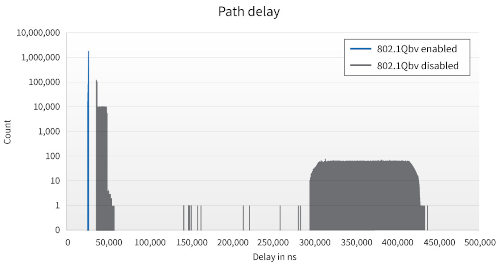
La distribución de los retrasos de la ruta se volvió fuertemente bimodal bajo estas condiciones, con muchos paquetes experimentando retrasos de más de 300 µs, aunque una gran proporción llegó a su destino en menos de 60 µs. En las pruebas de los efectos de estos retrasos en un escenario industrial, con los paquetes que llegan más tarde de una fecha límite programada y se descartan en lugar de usarse para proporcionar datos potencialmente incorrectos a un bucle de control, el resultado fue una falla en lograr un movimiento suave y alcanzar posiciones de destino programadas.
Las incorporaciones de redes sensibles al tiempo (TSN) al estándar Ethernet brindan a los OEM e integradores la capacidad de usar la red de alta velocidad para aplicaciones de transmisión de medios y en tiempo real. Estos estándares incluyen IEEE 802.1AS, el Protocolo de tiempo de precisión generalizado (gPTP), que define el comportamiento de temporización y sincronización para Ethernet en entornos TSN, y el estándar IEEE 802.1Qbv, que añade mejoras para permitir que el tráfico se envíe de acuerdo con un cronograma estricto.
El gPTP permite que los dispositivos de punto final en una red Ethernet acuerden una hora local común con una precisión inferior al microsegundo y tengan en cuenta los retrasos en la ruta a través de la red que los conecta. Con una referencia de tiempo común, gPTP permite el uso de la programación de paquetes y el modelado consciente del tiempo para garantizar que los paquetes de alta criticidad se entreguen dentro de un marco de tiempo conocido.
El programador consciente del tiempo IEEE 802.1Qbv separa las ventanas de transmisión en un ciclo de duración fija. Dentro de cada ciclo, se pueden asignar diferentes intervalos de tiempo a uno o más de los ocho niveles de prioridad IEEE 802.1Q y los paquetes asignados a esos niveles reciben el uso exclusivo de la red durante esa ventana de tiempo.
Toshiba construyó sus bancos de pruebas en torno a controladores Ethernet que implementan la funcionalidad gPTP e IEEE 802.1Qbv para poder ver el efecto que tienen estas técnicas en tareas de software industriales y automotrices representativas. Mientras que el retraso de la ruta en una configuración basada en protocolos heredados varió entre 50 µs y 430 µs, la distribución de paquetes sensibles al tiempo que usaban las funciones de gPTP e IEEE 802.1Qbv se redujo a una distribución normal mucho más estrecha centrada en 25,5 µs y con una fluctuación de solo 0,3 µs. Esto permitió un control fluido de todos los ejes de la máquina-herramienta, sin perder objetivos de posicionamiento.
 Con su soporte para gPTP, IEEE 802.1Qav, IEEE 802.1Qbv y otros elementos importantes para el control en tiempo real, el TC9562 y el TC9563 son elementos importantes para construir sistemas de control industrial y automotriz confiables. El TC9562 admite Ethernet de 1 Gbps y el TC9563 amplía la capacidad de red a dos puertos, ambos capaces de admitir velocidades de datos de 10 Gbps. Además de la capacidad de Ethernet de alta velocidad, ambos dispositivos incorporan funciones que agilizan las comunicaciones hacia y desde los SoC multinúcleo huésped a través de interfaces PCIe que implementan capacidades Gen3 en el caso del TC9563 junto con virtualización de E/S de ruta única (SR IOV), una función que mejora el rendimiento del software que se ejecuta bajo un hipervisor.
Con su soporte para gPTP, IEEE 802.1Qav, IEEE 802.1Qbv y otros elementos importantes para el control en tiempo real, el TC9562 y el TC9563 son elementos importantes para construir sistemas de control industrial y automotriz confiables. El TC9562 admite Ethernet de 1 Gbps y el TC9563 amplía la capacidad de red a dos puertos, ambos capaces de admitir velocidades de datos de 10 Gbps. Además de la capacidad de Ethernet de alta velocidad, ambos dispositivos incorporan funciones que agilizan las comunicaciones hacia y desde los SoC multinúcleo huésped a través de interfaces PCIe que implementan capacidades Gen3 en el caso del TC9563 junto con virtualización de E/S de ruta única (SR IOV), una función que mejora el rendimiento del software que se ejecuta bajo un hipervisor.
Tanto en los entornos de automoción como de automatización industrial, la combinación de rendimiento en tiempo real y comunicaciones de gran ancho de banda se está convirtiendo en un requisito clave. La implementación de las mejoras de TSN en Ethernet en dispositivos como TC9562 y TC9563 de Toshiba garantizan que los integradores de sistemas y los fabricantes de equipos originales tengan lo que necesitan para implementar redes en tiempo real de gran ancho de banda dentro de vehículos avanzados y sistemas de fábrica.




Cursos Técnicos y Seminarios
Webinar: ventajas de los cables de RF personalizados
Mouser Electronics, Inc ha colaborado con Molex para ofrecer a la comunidad de ingenieros un nuevo ...
Centro de recursos técnicos sobre retos de la ciberseguridad
En el mundo interconectado de hoy en día, la necesidad de integrar la seguridad en el nivel ...
Webinars D-Link sobre formación TIC
D-Link ha anunciado su nueva temporada de sus D-Link Academy Webinars. Los temas de esta nueva ...
Curso básico de Fibra Óptica Gratuito
Aquí tienes todas las fichas del Curso básico de fibra óptica publicado en los primeros número de ...
Plataforma Inmersiva de e-Learning Keysight University
Keysight Technologies, Inc ha anunciado Keysight University, una ...