

Le bus CAN (CAN = Controller Area Network) offre d'excellentes fonctionnalités grâce à son modèle de fonctionnement où il produit et consomme des messages de données. Chaque type de message possède un identifiant (un code de 11 ou 29 bits) qui révèle son contenu aux autres participants. La valeur de l'identifiant est également associée à une priorité : plus le nombre est bas, plus la priorité est élevée. Tous les participants d'un bus CAN peuvent lire et envoyer des messages. Si deux participants envoient un message simultanément, un système de priorité est appliqué pour résoudre le problème. Le participant dont le message est le moins prioritaire est mis de côté et envoie son message ultérieurement.
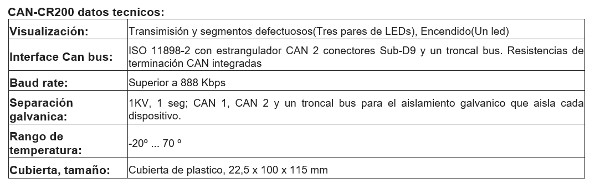 Fonctionnement :
Fonctionnement :
Le principe fondamental du réseau CAN est que tous les participants reçoivent simultanément le même bit de données.
Ceci limite la vitesse et la longueur maximales d'un bus CAN, car le signal électrique se propage à 200 000 km/s dans un fil de cuivre (ou 300 000 km/s dans le vide), soit environ 20 cm/ns ou 30 cm/ns.
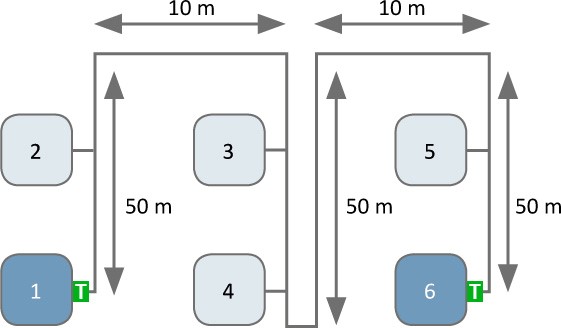
En restructurant le bus CAN de bus en étoile, la distance que doivent parcourir les signaux peut être raccourcie, augmentant ainsi l'extension du bus CAN.
Les lignes couplées par le répéteur CAN sont des segments électriques indépendants qui doivent être correctement terminés (à chaque point du câble avec une résistance de 120 ohms) en termes de signal pour éviter les réflexions de signal.
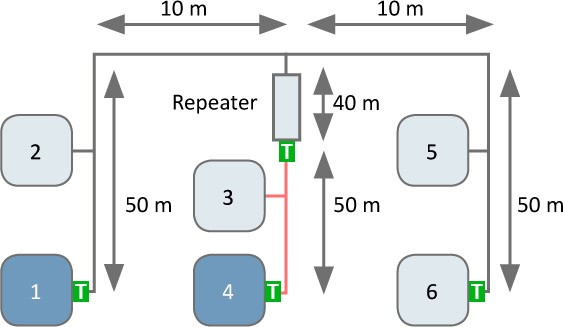 En fonction des capacités de sortie de l'émetteur-récepteur, la division des systèmes CAN en plusieurs segments de câble CAN, connectés via des répéteurs CAN, augmente le nombre maximal de périphériques sur le bus. L'utilisation de répéteurs n'affecte pas le comportement en temps réel du système car, en termes de transmission, il correspond à un réseau composé uniquement de lignes.
En fonction des capacités de sortie de l'émetteur-récepteur, la division des systèmes CAN en plusieurs segments de câble CAN, connectés via des répéteurs CAN, augmente le nombre maximal de périphériques sur le bus. L'utilisation de répéteurs n'affecte pas le comportement en temps réel du système car, en termes de transmission, il correspond à un réseau composé uniquement de lignes.

