
La première partie décrivait les objectifs de l'entrelacement, analysait les erreurs à l'origine des artefacts d'entrelacement et présentait les options de convertisseur analogique-numérique (CAN) à 40 GSPS utilisant l' AD9084 . La deuxième partie présentait une option d'échantillonnage direct en quadrature, ainsi qu'un mécanisme de correction en quadrature détaillé. La troisième partie présente des méthodes permettant de mettre en œuvre des options d'entrelacement temporel.
La figure 1 illustre le traitement numérique du signal (DSP) intégré décrit dans la première partie. L'architecture d'horloge prévoit l'inversion interne des horloges des canaux CAN adjacents au sein du dispositif. L'option d'entrelacement temporel la plus simple consiste à décharger toutes les données de deux canaux à la fréquence d'échantillonnage maximale. Malheureusement, cette option nécessite la fusion des données des deux canaux au sein du FPGA ou de l'ASIC à la fréquence maximale avant traitement. La consommation d'énergie et la surcharge engendrées par cette option la rendent peu intéressante. Une alternative consiste à exploiter le filtrage des données au sein du DSP intégré, comme l'échantillonnage en quadrature.
 Figure 1. Moitié d'une section du trajet de réception du MxFE, montrant deux CAN et un DSP intégré.
Figure 1. Moitié d'une section du trajet de réception du MxFE, montrant deux CAN et un DSP intégré.
La nécessité d'une puissance maximale pour le débit de données impose une option permettant d'entrelacer temporairement les CAN adjacents, d'utiliser le DSP intégré et de télécharger les données à débit réduit grâce à la conversion numérique descendante (DDC). Une méthode permettant de résoudre les limites de Nyquist du CAN en exploitant les informations de phase est décrite ci-dessous. L'un des principaux avantages de ces concepts réside dans la possibilité d'optimiser le nombre de canaux au détriment de la fréquence d'échantillonnage sans augmenter le débit de données numériques, tout en conservant les capacités programmables du DSP intégré.
Segments entrelacés dans le temps.
Imaginez que les données du CAN soient réduites à des échantillons pairs et impairs. Chaque flux de données a une fréquence d'échantillonnage moitié moindre et contient un échantillon décalé de deux échantillons. C'est ce qui se produit lorsque les segments du CAN sont entrelacés. Chaque segment a une fréquence moitié moindre et contient un échantillon décalé de deux échantillons. L'approche traditionnelle consiste à fusionner ces données à la fréquence d'échantillonnage complète. Une approche alternative consiste à utiliser l'information de phase entre les deux segments, ce qui permet de résoudre les régions de Nyquist sans augmenter le débit de données numériques. La figure 2 présente le concept de segments entrelacés visualisés dans le domaine fréquentiel.
Prenons l'exemple d'un CAN entrelacé temporelment 2× :
![]()
Les sous-ADC fournissent les échantillons pairs et impairs.![]()
![]()
Si nous interprétons les signaux sous-ADC dans le domaine fréquentiel, nous pouvons les relier au signal pleine vitesse souhaité à l'aide des équations 4 et 5.

Chaque signal de sous-convertisseur analogique-numérique (CAN) est composé de deux signaux de repliement de spectre provenant de régions de Nyquist opposées. La polarité de ce repliement diffère selon que les échantillons sont pairs ou impairs. Nous pouvons exploiter cette propriété pour séparer les première et deuxième régions de Nyquist lors du post-traitement.

Figure 2. Interprétation des coupes intercalées dans le domaine fréquentiel.
Entrelacement temporel suivi de filtres FIR.
En exploitant l'information de phase, une méthode permet de résoudre un signal de Nyquist avec une première ou une seconde fréquence de coupure. La figure 3 illustre une approche possible. Il est important de noter que le délai temporel est…

Figure 3. Différence de phase entre les coupes intercalées.
À la sortie du CAN, un décalage temporel existe entre les deux segments d'horloge d'une demi-période. Il en résulte une phase linéaire en fonction de la fréquence. Si un filtre à retard fractionnaire d'un demi-échantillon est ensuite appliqué à la sortie d'un canal du CAN, la phase est compensée sur le premier diagramme de Nyquist, mais sur le second, un déphasage apparaît entre les segments entrelacés. C'est cette propriété, la linéarité de la phase en fonction de la fréquence, qu'il convient d'exploiter avec le DSP intégré du CAN. Par conséquent, à la sortie du CAN, la phase est linéaire en fonction de la fréquence d'entrée, la pente étant déterminée par le retard de coupure d'une demi-période. La différence de phase entre les fréquences fondamentale et image est représentée dans la partie inférieure de la figure 3, par rapport à la fréquence d'entrée.
À la sortie du CAN, bien que la pente de la phase en fonction de la fréquence soit visible, les informations disponibles sont insuffisantes. L'ajout d'un retard fractionnaire d'un demi-échantillon à l'un des segments du CAN fait apparaître une propriété importante. Il en résulte que les sorties du CAN sont en phase si la fréquence d'entrée se situe dans la première région de Nyquist et présentent un déphasage de 180° si le signal se situe dans la seconde région de Nyquist. Cette propriété permet de sommer les signaux et de créer une méthode d'annulation de la région de Nyquist.
Cette méthode de sommation est utile lorsque le signal d'intérêt est éloigné de fS/2. Pour les signaux qui franchissent la limite de fS/2, une approche alternative est nécessaire. Si une transformée de Hilbert ou un déphasage de 90° est ajouté au filtre numérique fractionnaire, le déphasage est en quadrature aux sorties du filtre. La quadrature résultante présente également une inversion de phase entre I et Q à fS/2 et peut être utilisée comme entrée en quadrature pour un convertisseur numérique-analogique complexe, rendant cette option analogue à l'échantillonnage en quadrature décrit dans la partie 2. Ceci est illustré sur la figure 4.
Correction d'image pour l'entrelacement temporel.
La section précédente a présenté différentes méthodes de combinaison des sorties de deux CAN entrelacés temporellement afin d'obtenir un signal à vitesse double, en supposant une parfaite correspondance entre les deux CAN. Cependant, en pratique, un décalage de gain, de phase et de délai apparaît entre les CAN et les branches du diviseur de puissance. Comme pour la technique d'échantillonnage en quadrature, ce décalage peut être corrigé par l'utilisation d'un filtre semi-complexe à la sortie du CAN ou, alternativement, par la sommation des sorties des filtres complexes complets d'une paire de canaux DDC.
Comme illustré sur la figure 5, le système d'entrelacement temporel peut être modélisé par un diviseur de puissance idéal alimentant deux chemins de signaux analogiques avec des fonctions de transfert différentes : H₀(ω) représente la fonction de transfert du chemin capturant les échantillons pairs et H₁(ω) celle du chemin capturant les échantillons impairs. Les chemins de signaux pairs et impairs seront désignés respectivement par chemin 0 et chemin 1.
La figure 4 illustre deux options d'entrelacement temporel exploitant les filtres intégrés. À gauche, l'ajout d'un délai d'un demi-échantillon à l'une des sections d'entrelacement entraîne la mise en phase des signaux à la seconde fréquence de Nyquist et leur opposition de phase à la seconde fréquence de Nyquist. À droite, l'intégration d'une transformée de Hilbert dans les coefficients du filtre FIR conduit à une mise en quadrature des signaux à la sortie du filtre, avec un déphasage aux limites de Nyquist, similaire à l'échantillonnage en quadrature décrit dans la partie 2.
 Figure 5. Modèle d'entrelacement temporel.
Figure 5. Modèle d'entrelacement temporel.
À l'instar de la correction d'erreurs quantiques (QEC), la correction par entrelacement temporel est une forme relative d'égalisation. Par exemple, sur la figure 6, le chemin 0 peut être considéré comme idéal et le chemin 1 comme équivalent au chemin 0. La réponse du chemin 1 peut donc être modélisée comme la combinaison de : (a) un retard nominal d'un demi-échantillon ; (b) la réponse commune du chemin 0 ; et (c) un décalage ou une différence de réponse du chemin 1 par rapport au chemin 0.
 Figure 6. Modèle d'entrelacement temporel relatif en fonction d'un délai nominal de 1/2 échantillon H0,5 (ω) et d'une réponse de désadaptation HΔ (ω).
Figure 6. Modèle d'entrelacement temporel relatif en fonction d'un délai nominal de 1/2 échantillon H0,5 (ω) et d'une réponse de désadaptation HΔ (ω).
À l'aide d'identités trigonométriques simples, la sortie du chemin 1 peut être décomposée en une somme incluant des termes en cosinus retardés.
![]()

En l'absence de décalage entre le chemin 0 et le chemin 1 (c'est-à-dire HΔ(ω) = 1), les sorties idéales de la configuration d'échantillonnage en quadrature peuvent être définies comme suit :
![]()

La figure 7 illustre le résultat de la stimulation de ce modèle d'entrelacement temporel relatif par un signal sinusoïdal x(t) = cos(ω0 t). Le retard nominal de 1/2 échantillon H0,5(ω) et la réponse de désadaptation HΔ(ω) = AΔ(ω) e(jθΔ(ω)) modifient l'amplitude et la phase du signal à un seul trajet, comme indiqué.
 Figure 7. Simulation du modèle d'entrelacement temporel avec un signal d'entrée sinusoïdal.
Figure 7. Simulation du modèle d'entrelacement temporel avec un signal d'entrée sinusoïdal.
Ainsi, pour un signal sinusoïdal ou tout autre signal à bande étroite centré sur la fréquence ω0, les sorties réelles peuvent être exprimées en fonction des sorties idéales. Le dispositif d'entrelacement temporel peut être considéré comme un système linéaire 2 × 2 générant une erreur d'entrelacement temporel. La correction de cette erreur est obtenue en inversant ce système linéaire 2 × 2 afin de retrouver les sorties idéales x0(t) et x1(t), comme illustré sur la figure 8. Il est à noter que, dans le cas du signal monophonique décrit dans cet exemple, la solution de correction d'erreur présentée sur la figure 8 n'est qu'une des nombreuses solutions possibles, celles-ci variant selon le réglage d'un filtre par rapport à l'autre. La solution de correction d'erreur devient unique lorsqu'il s'agit de corriger simultanément des signaux dans plusieurs zones de Nyquist, mais cette solution unique dépasse le cadre de cet article.
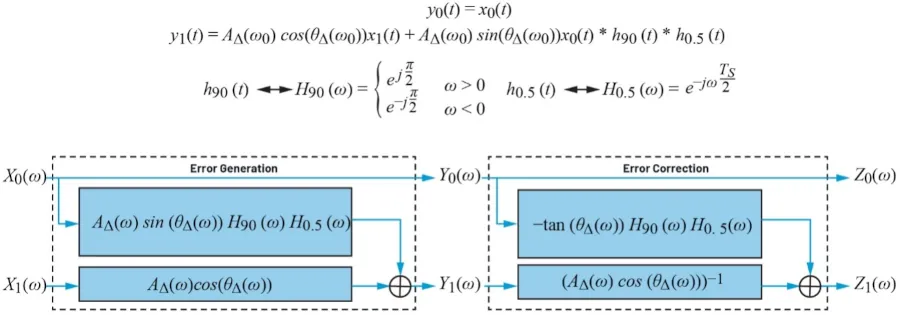
Figure 8. Modèle d'entrelacement temporel relatif montrant à la fois la génération d'erreurs et la correction d'erreurs à travers une structure de filtre semi-complexe.
Le filtre de croisement reliant le chemin 0 au chemin 1 doit implémenter un retard d'un demi-échantillon (H0,5(ω)) et un déphasage de 90° (H90(ω)).
Ce modèle de génération d'erreur par entrelacement temporel présente des similarités avec le modèle de génération d'erreur par échantillonnage en quadrature, mais une différence significative subsiste. Avec un stimulus monotone, l'erreur d'échantillonnage en quadrature peut être modélisée et corrigée à l'aide de filtres à valeur réelle à un seul coefficient. Autrement dit, la correction ne nécessite qu'une correction de gain sur chacun des deux filtres à valeur réelle. En revanche, la correction par entrelacement temporel requiert une correction de phase et, par conséquent, un filtre de croisement à plusieurs coefficients reliant le chemin 0 au chemin 1.
Avec la topologie donnée, les sorties z0[n] et z1[n] représentent respectivement les échantillons pairs et impairs d'un signal entrelacé 2× échantillonné à une fréquence double. La sortie entrelacée z[n] est construite comme suit :

Cependant, comme décrit dans les sections précédentes, le délai d'un demi-échantillon combiné à une transformée de Hilbert peut être utilisé pour transformer z0[n] et z1[n] en une représentation en quadrature. La figure 9 illustre la cascade de correction par entrelacement temporel utilisant les filtres G0(ω) et G1(ω), et la transformation en quadrature utilisant Gq(ω), ce qui donne des sorties en quadrature z[n] = zi[n] + jzq[n].
 Figure 9. Combinaison d'une correction par entrelacement temporel, pour corriger le désaccord analogique entre les chemins 0 et 1, avec une transformée de Hilbert pour le convertir en une représentation en quadrature.
Figure 9. Combinaison d'une correction par entrelacement temporel, pour corriger le désaccord analogique entre les chemins 0 et 1, avec une transformée de Hilbert pour le convertir en une représentation en quadrature.
Les étages de filtrage en cascade peuvent être fusionnés en une seule structure de filtre semi-complexe en incluant la transformée en quadrature au premier étage.
 À présent, grâce à un signal de sortie en quadrature corrigé, l'analyse présentée dans les sections précédentes permet de différer la correction de la sortie ADC, effectuée à l'aide du filtre programmable (PFILT), vers la sortie DDC, effectuée à l'aide du filtre complexe (CFIR).
À présent, grâce à un signal de sortie en quadrature corrigé, l'analyse présentée dans les sections précédentes permet de différer la correction de la sortie ADC, effectuée à l'aide du filtre programmable (PFILT), vers la sortie DDC, effectuée à l'aide du filtre complexe (CFIR).
La figure 10 présente des mesures comparant l'entrelacement temporel et l'entrelacement en quadrature, avec PFILT ou CFIR pour la correction d'erreur. Les résultats montrent que les erreurs sont d'amplitude similaire pour les deux méthodes et que le filtre CFIR offre de meilleures performances dans les deux cas.

Figure 10. Rejet d'image mesuré en comparant l'entrelacement temporel et en quadrature.
Il est à noter que les erreurs sont sensiblement identiques et que, dans les deux cas, la correction CFIR améliore les performances car le CFIR fonctionne à une vitesse réduite et les coefficients du filtre ont une période effective plus longue.
Comme décrit dans la partie 2, les erreurs après correction par PFILT sont limitées par l'ondulation de fréquence due aux longues lignes de transmission et à l'adaptation d'impédance des diviseurs RF aux deux canaux ADC. La réponse du PFILT peut se rapprocher de celle du CFIR après correction des problèmes susmentionnés.
Comparaison des options d'entrelacement :
Plusieurs options d'entrelacement ont été décrites. Une comparaison de ces options est justifiée ci-dessous. Les mesures de la figure 10 montrent que les performances de rejet d'image sont pratiquement identiques pour l'entrelacement en quadrature et l'entrelacement temporel ; le choix de la meilleure option dépend donc d'autres considérations pratiques liées à l'application.
Déchargement pleine vitesse vs. DSP intégré :
Lorsqu’un débit de données de 40 GSPS est requis, cela est possible grâce aux dernières solutions MxFE. La principale limitation pratique réside dans l’absorption de l’augmentation du débit, puis dans le calibrage et la reformulation du flux de données à 40 GSPS avant traitement. Dans de nombreux cas, il est très avantageux de continuer à surveiller une bande passante de Nyquist de 20 GHz, tout en utilisant le DSP intégré pour réduire la surcharge du traitement numérique. Les options utilisant le DSP intégré ont été au cœur de la plupart des descriptions ; cependant, le déchargement pleine vitesse reste une option réaliste si nécessaire.
Entrelacement temporel vs. Entrelacement en quadrature : L’
entrelacement en quadrature présente deux avantages :
• Utilisation de la FFT en mode complexe intégrée
• L’entrée de l’hybride en quadrature peut être considérée comme un amplificateur équilibré. Les réflexions du CAN sont transmises au port de terminaison, assurant une meilleure adaptation d’impédance à large bande.

Le principal inconvénient de l'échantillonnage en quadrature réside dans la bande passante limitée des hybrides en quadrature disponibles dans le commerce. Ces composants prennent en charge une plage de 2 GHz à 18 GHz, ce qui représente historiquement une large bande passante. Pour étendre cette bande passante vers les basses fréquences, il est possible d'utiliser des diviseurs de puissance résistifs.
Correction PFILT vs. CFIR :
Bien que les techniques PFILT et CFIR de l’AD9084 prennent toutes deux en charge la correction par entrelacement temporel, chacune présente des avantages et des inconvénients. La technique PFILT fonctionne à la fréquence d’échantillonnage maximale du CAN, ce qui permet de corriger de larges bandes passantes avec un seul ensemble de coefficients de filtrage et d’exploiter pleinement les fonctionnalités DSP intégrées. En revanche, la technique CFIR prend en charge des réponses impulsionnelles plus longues, ce qui se traduit directement par de meilleures performances dans cette application. Le tableau 1 résume ces avantages et inconvénients.
Conclusion :
Cette série en trois parties a décrit des méthodes pratiques pour réaliser un premier échantillonnage de Nyquist sur 20 GHz à l’aide de CAN disponibles dans le commerce. La première partie a présenté les objectifs et les options disponibles. La deuxième partie a décrit en détail l’échantillonnage direct en quadrature, ses limitations et les corrections nécessaires. La troisième partie a conclu sur les options d’entrelacement temporel et une comparaison des choix possibles. Tout au long de cette série, le contexte technique de la présentation des résultats obtenus, ainsi que les mesures finales, ont été fournis.
Un effort considérable a été consacré au maintien de la plage dynamique et des performances en matière de bruit lors de l’augmentation des fréquences d’échantillonnage. Les CAN AD9084 20 GSPS offrent des performances optimales avec des bandes passantes d’entrée allant jusqu’à 18 GHz. Les performances de ces CAN ont été maintenues, tout en étant portées à 40 GSPS, et des options sélectionnables par l’utilisateur ont été proposées en fonction des objectifs de l’application.
futurs
porteront principalement sur les mises à jour logicielles et micrologicielles permettant une intégration optimisée des options d'entrelacement dans les systèmes finaux. Des modifications seront apportées à la carte d'évaluation afin d'optimiser les diviseurs RF et les CAN.
Remerciements
Les auteurs tiennent à exprimer leur gratitude aux équipes de conception. La combinaison des fréquences d'échantillonnage du CAN, de la bande passante d'entrée et du DSP intégré a permis le développement des concepts présentés. Nous remercions également les concepteurs du CAN et Analog Devices pour leur longue collaboration, qui a ouvert la voie à des décennies de travaux de conception et a abouti au premier échantillonnage Nyquist à grande plage dynamique de 20 GHz.
Références :
Ali, Ahmed. Convertisseurs de données haute vitesse. IET, août 2016.
Kester, Walt. Manuel de conversion de données. Analog Devices, Inc., 200.
Manganaro, Gabriele. Convertisseurs de données avancés. Cambridge University Press, 2012.
À propos des auteurs :
Ian Beavers est ingénieur d'applications et responsable du laboratoire client au sein de l'équipe Systèmes aérospatiaux et de défense d'Analog Devices, à Durham, en Caroline du Nord. Il travaille pour l'entreprise depuis 1999. Ian possède plus de 25 ans d'expérience dans l'industrie des semi-conducteurs. Il est titulaire d'une licence en génie électrique de l'Université d'État de Caroline du Nord et d'un MBA de l'Université de Caroline du Nord à Greensboro.
Peter Delos est responsable technique du groupe Aérospatiale et Défense chez Analog Devices à Greensboro, en Caroline du Nord. Il a obtenu sa licence en génie électrique à Virginia Tech en 1990 et son MBA à NJIT en 2004. Peter possède plus de 30 ans d'expérience dans l'industrie. Il a consacré la majeure partie de sa carrière à la conception de systèmes analogiques et RF avancés, aux niveaux de l'architecture, des circuits imprimés et des circuits intégrés. Actuellement, il se concentre sur la miniaturisation des récepteurs, des générateurs de formes d'onde et des synthétiseurs hautes performances pour les applications à réseau phasé.
Brian Reggiannini est ingénieur principal en conception de systèmes. Il a conçu, mis en œuvre et assuré le support des étalonnages système pour plusieurs générations d'émetteurs-récepteurs sans fil d'Analog Devices. Ses domaines d'expertise technique comprennent le traitement du signal, l'apprentissage automatique, les systèmes embarqués et les systèmes intégrant des composants analogiques assistés numériquement. Brian a obtenu sa licence (Sc.B.), sa maîtrise (Sc.M.) et son doctorat (Ph.D.) à l'Université Brown, respectivement en 2007, 2009 et 2012.
Connor Bryant est ingénieur d'applications systèmes chez Analog Devices, au sein de la division aérospatiale et défense à Durham, en Caroline du Nord. Il a rejoint ADI en 2023. Il se concentre actuellement sur la conception et l'analyse de chaînes RF mixtes. Il a obtenu sa licence en génie électrique à l'Université d'État de Caroline du Nord en 2022 et sa maîtrise en génie électrique dans la même université en 2023.



