
Dies lässt sich mit dem E-PRS unter Verwendung eines realen digitalen Radarempfängers, eines Signalgenerators und eines programmierbaren Daten- und Signalprozessors realisieren. Im Gegensatz zur Software-Simulation berücksichtigt diese Methode adäquat das Verhalten und die Grenzen eines realen Hardwareprozesses, einschließlich Nichtlinearität, Verzerrung, Sättigung usw. Dieser Ansatz wird üblicherweise als Hardware-in-the-Loop (HWIL)-Simulationssystem bezeichnet. Darüber hinaus ermöglicht diese Methode die Wiedergabe der Simulation und die Analyse der erfassten Daten für eine detaillierte Untersuchung der Einsturzwirksamkeit oder für Schulungszwecke.
 Das E-PRS kann bodengestützte, luftgestützte und schiffsgestützte Radargeräte sowie Raketensuchköpfe (aktiv und halbaktiv) simulieren.
Das E-PRS kann bodengestützte, luftgestützte und schiffsgestützte Radargeräte sowie Raketensuchköpfe (aktiv und halbaktiv) simulieren.
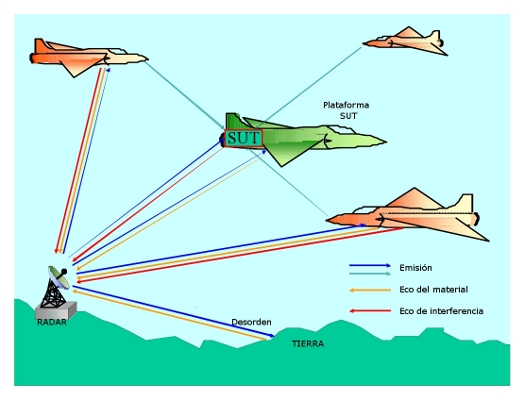
Ziele und andere Sender/Streuer können auf HF-Ebene mithilfe eines Moduls namens Radar Environment Generator (E-REG) oder handelsüblicher Komponenten von Drittanbietern generiert werden.
Das E-REG empfängt die Position und Flugbahn der Plattformen vom externen Szenariosimulator und generiert entsprechend die Zielmaterialechos.
Die übergeordnete Steuerung des gesamten Systems und der Simulation, einschließlich der Szenariosteuerung, erfolgt durch einen Computer mit der entsprechenden Software und physischen Schnittstellen, der auch die Anzeige- und Datenanalysefunktionen bereitstellt und die Datenbank des benutzerprogrammierten Radarmodells hostet.
 Mit der entsprechenden Hardware- und Softwarekonfiguration des E-PRS können mehrere Prüflinge gleichzeitig getestet werden.
Mit der entsprechenden Hardware- und Softwarekonfiguration des E-PRS können mehrere Prüflinge gleichzeitig getestet werden.
Das E-PRS ist zudem ein wertvolles Werkzeug für die Radarsystementwicklung, zur Überprüfung der Radareffektivität und zum Testen neuer ECCM-Verfahren.
Funktionsprinzip:
Der E-PRS-Sendeimpuls wird von einem Arbiträrsignalgenerator erzeugt. Die Signalform kann einfach oder komplex sein, um verschiedene Impulskompressionsverfahren (Chirp, Barker usw.) anzuwenden.
Der Prüfling empfängt die vom E-PRS erzeugten, mit dem simulierten Antennenmuster gewichteten Impulse. Aus diesem Eingangssignal wird das Störsignal (SPJ oder SOJ) generiert, das zusammen mit dem Echo des Zielmaterials (vom E-REG) in den HF- oder ZF-Eingang (abhängig von der Systemarchitektur) des E-PRS eingespeist wird.
 Mithilfe des RX-Antennensimulators wird die Empfangsantennen-Gewichtung angewendet und das Signal zur Analog-Digital- und Basisbandwandlung an den Digitalempfänger gesendet. Das resultierende Signal wird durch einen benutzerprogrammierbaren angepassten Filter verarbeitet, der den entsprechenden Filter entsprechend der aktuellen TX-Wellenform implementiert.
Mithilfe des RX-Antennensimulators wird die Empfangsantennen-Gewichtung angewendet und das Signal zur Analog-Digital- und Basisbandwandlung an den Digitalempfänger gesendet. Das resultierende Signal wird durch einen benutzerprogrammierbaren angepassten Filter verarbeitet, der den entsprechenden Filter entsprechend der aktuellen TX-Wellenform implementiert.
Nach der Filterung wird das Signal an eine Reihe von DSPs gesendet, die das gewünschte Radarsignal implementieren und die Datenverarbeitung gemäß einer benutzergenerierten oder vorinstallierten Algorithmenbibliothek durchführen.
Der Empfänger reagiert exakt wie ein reales Radar (des gewählten Typs) und liefert dem Benutzer alle notwendigen Daten zur Bewertung der tatsächlichen Auswirkungen des Prüflings auf die Radarerkennung und -verfolgung.
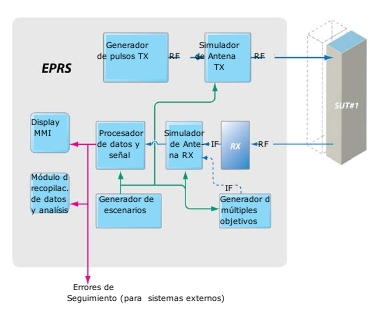
Systemarchitektur:
Das E-PRS (siehe Blockdiagramm) besteht aus folgenden Funktionsblöcken:
• Mikrowellenempfänger
• Digitalempfänger (4 oder mehr Kanäle)
• Mikrowellensender
• Programmierbare Signal- und Datenprozessoren
• TX-Radar und RX-Antennensimulator
• HF/ZF/Chaff/Clutter-Generator-Ziel(e) (E-REG oder andere)
• Umgebungsprogrammiersoftware (Framework)
• Anzeige und Datenerfassung / Systemanalyse
Das auf dem E-ERP-Hostrechner laufende Framework verfügt über eine offene Schnittstelle zum Hinzufügen benutzerdefinierter Radarmodellbibliotheken. Einmal hinzugefügte Elemente sind wie die Standardelemente wiederverwendbar.
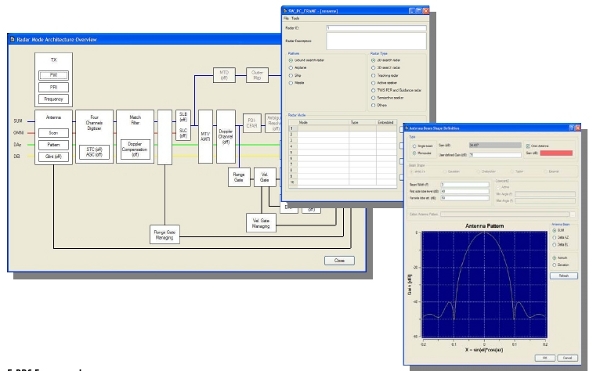
Softwarefunktionen:
Ein erweiterter Programmiermodus zur Erstellung von Radarmodellen mit einer benutzerfreundlichen, grafischen Oberfläche namens E-PRS-Framework steht zur Verfügung. Mit diesem Tool kann der Benutzer mithilfe der im System enthaltenen Funktionsbibliothek ein Radarmodell nach seinen Bedürfnissen generieren.
Alternativ können Radarmodelle auch durch Schreiben der Algorithmen in C/C++ programmiert werden. So kann der Benutzer die E-PRS-Basisbibliothek erweitern und anschließend alle möglichen Radarsysteme simulieren.
Über die Plattform und den Radartyp hinaus kann der Bediener in dieser Umgebung alle Betriebsparameter des Radars auswählen, wie z. B.:
• Adaptive Filter: Barker, Zwei-Phasen- und Vier-Phasen-Filter, CHIRP.
• Sendeparameter (PRF, Puls, Alternieren, Jitter, MOP, CW usw.)
• MTI-AMTI-MTD-Verarbeitung
• Glint-Ziel
• SLB und SLC
• Dopplerkanal
• PDI/CFAR, TWS, TAS
• Schleifenverfolgung: Entfernung, Winkel, Geschwindigkeit
• Mehrdeutigkeitsauflösung
• Antennentyp und Strahlungsdiagramm.
DCA (Informationserfassung und -analyse):
Dieses mit E-PRS mitgelieferte Softwaretool ermöglicht es dem Benutzer, alle wichtigen Ereignisse während der Simulation zu erfassen und Informationen im Falle eines erfolgreichen/fehlgeschlagenen ECM-Vorgangs des Prüflings abzurufen. DCA zeichnet alle Makroereignisse (z. B. Verfolgung, Verfolgungsverlust, Verfolgungsfehler usw.) sowie Szenario- und Zielinformationen auf.
Die gesamte Simulation kann zu Schulungszwecken in verschiedenen Anzeigemodi (PPI, A-, B- und C-Scope) wiedergegeben werden.






