

Der CAN-Bus (CAN = Controller Area Network) bietet mit seinem Betriebsmodell, das sowohl das Senden als auch das Empfangen von Datennachrichten ermöglicht, hervorragende Funktionen. Jede Datennachricht besitzt eine ID (einen 11-Bit- oder 29-Bit-Identifikationscode). Die ID gibt den Nachrichteninhalt für andere Teilnehmer preis. Der ID-Wert ist außerdem eine Priorität zugeordnet: Je niedriger die Zahl, desto höher die Priorität. Alle Teilnehmer eines CAN-Busses können alle Nachrichten lesen und senden. Senden zwei Teilnehmer gleichzeitig eine Nachricht, entscheidet die Priorität. Der Teilnehmer mit der Nachricht niedrigerer Priorität wird zurückgestellt und sendet seine Nachricht später
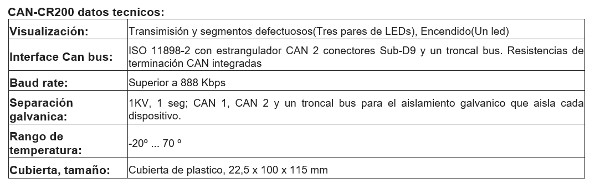 Funktionsweise:
Funktionsweise:
Das zentrale Element von CAN besteht darin, dass alle Teilnehmer im Bus gleichzeitig dasselbe Datenbit empfangen.
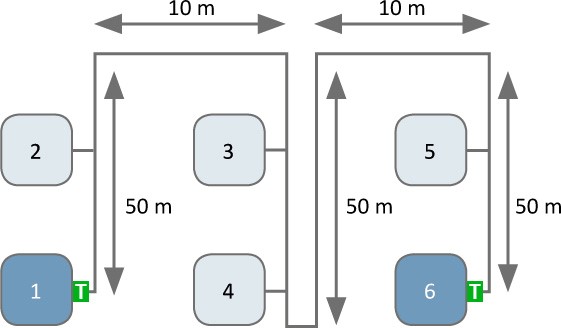
Dies begrenzt die maximale Geschwindigkeit und Länge eines CAN-Busses, da sich ein elektrisches Signal in einem Kupferdraht mit 200.000 km/s ausbreitet, im Vakuum sogar mit 300.000 km/s. Dies entspricht etwa 20 cm/ns bzw. 30 cm/ns.
Durch die Umstrukturierung des CAN-Busses von Bus zu Stern kann die Entfernung, die die Signale zurücklegen müssen, verkürzt und somit die Reichweite des CAN-Busses erhöht werden.
Die vom CAN-Repeater gekoppelten Leitungen sind unabhängige elektrische Segmente, die hinsichtlich des Signals ordnungsgemäß abgeschlossen werden müssen (an jedem Punkt des Kabels mit einem Widerstand von 120 Ohm), um Signalreflexionen zu vermeiden.
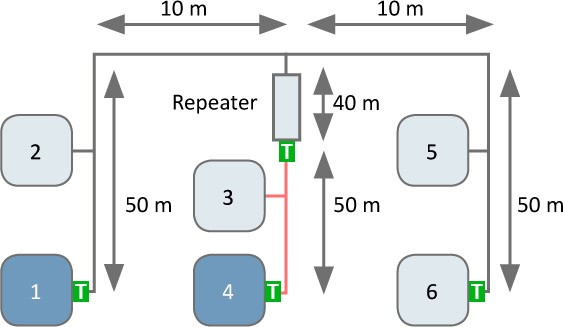 Abhängig von den Ausgangskapazitäten des Transceivers erhöht die Aufteilung von CAN-Systemen in mehrere CAN-Kabelsegmente, die über CAN-Repeater verbunden sind, die maximale Anzahl der Geräte am Bus. Der Einsatz von Repeatern beeinträchtigt das Echtzeitverhalten eines Systems nicht, da es hinsichtlich des Übertragungsverhaltens einem Netzwerk entspricht, das ausschließlich aus Leitungen besteht.
Abhängig von den Ausgangskapazitäten des Transceivers erhöht die Aufteilung von CAN-Systemen in mehrere CAN-Kabelsegmente, die über CAN-Repeater verbunden sind, die maximale Anzahl der Geräte am Bus. Der Einsatz von Repeatern beeinträchtigt das Echtzeitverhalten eines Systems nicht, da es hinsichtlich des Übertragungsverhaltens einem Netzwerk entspricht, das ausschließlich aus Leitungen besteht.





