

Con una tecnología de receptor de sincronización GPS bien diseñada, los usuarios del GPS pueden recuperar la sincronización extremadamente precisa de los relojes atómicos sincronizados a bordo de los satélites GPS. Esta sincronización coordinada permite a los receptores adyacentes alinearse con la misma referencia de tiempo. Los relojes atómicos espaciales del sistema GPS están sincronizados por el USNO - U.S. Naval Observatory (Observatorio Naval de Estados Unidos). El USNO realiza mediciones continuas con el Bureau International des Poids et Mesures (BIPM), la organización internacional de normalización con sede en París responsable del mantenimiento de la hora mundial, para garantizar una hora coordinada con el resto del mundo. Esta hora mundial coordinada, o "absoluta", se conoce como UTC - Universal Coordinated Time (Tiempo Universal Coordinado) más comúnmente. Aunque el GPS, desarrollado y mantenido por el US Department of Defense (Departamento de Defensa de Estados Unidos), fue la primera constelación de satélites de posición, navegación y sincronización (PNT) que se desplegó, actualmente existen varias tecnologías del Sistema Global de Navegación por Satélite (GNSS) desplegadas en todo el mundo para el PNT. Ejemplos de otros sistemas GNSS son Galileo (UE), Glonass (Rusia), Beidou (China), QZSS (Japón) e IRNSS (India).
A medida que las tecnologías inalámbricas han ido pasando sucesivamente por diferentes iteraciones tecnológicas, desde la 2G hasta la 5G, las arquitecturas de sincronización de las redes han ido evolucionando en paralelo. La RAN distribuida de 2/3G utilizaba receptores de sincronización GPS integrados en emplazamientos de macroceldas, la red 5G está pasando a un modelo más centralizado y/o ponderado en el que el GPS es una fuente de reloj basada en la red para la distribución de la sincronización.
Las arquitecturas de sincronización se han desarrollado en tres fases distintas. En la fase 1, la sincronización de la capa física o de paquetes se diseñó para las redes de frecuencia, el GPS se desplegó localmente en la torre de la estación base de la RAN distribuida (DRAN) para las aplicaciones TDD (fase). En la fase 2 se añadieron fuentes de GPS más centralizadas, y la sincronización se entregó por paquetes a "grupos" de unidades de banda base (BBU). Ambas fases, la 1 y la 2, utilizaron enlaces de sincronización propios desde las BBU a las radios. La fase 3 extenderá los protocolos de sincronización por paquetes directamente a las unidades de radio, sin depender de la sincronización propietaria y con menos requisitos de GPS en las estaciones base DRAN. Con la introducción de los conceptos de la RAN abierta en la 5G, las funciones de las BBU se clasificarán como centralizadas, CU, y de distribución, DU, y evolucionarán hacia funciones virtualizadas y basadas en servidores que no será necesario incluir en la ruta de sincronización.
Hay una importante consideración técnica que es el desencadenante de la migración de una arquitectura de sincronización GPS distribuida a una arquitectura de sincronización basada en la red, basada en el Protocolo de Tiempo de Precisión (PTP), la versión para telecomunicaciones del protocolo de sincronización sobre Ethernet IEEE 1588. La primera depende exclusivamente de los receptores GNSS, mientras que la segunda introduce el concepto de una combinación de tecnologías de receptores GNSS y PTP Grandmaster Clock. El problema más frecuente relacionado con la sincronización en las comunicaciones inalámbricas es la interferencia radioeléctrica co-canal. El despliegue de un receptor GPS en un emplazamiento celular, cuando el receptor GPS rastrea los satélites correctamente, permite la asignación adecuada de ranuras de tiempo de transmisión, lo que a su vez evita que las radios, que operan en frecuencias adyacentes o cercanas, se interfieran entre sí. En un grupo de radios con cobertura superpuesta, si un receptor GPS falla o deja de rastrear correctamente, esto hará que la radio conectada al receptor GPS interfiera con las radios adyacentes a medida que la sincronización se degrada o acumula errores de fase. La degradación de la sincronización se produce muy rápidamente porque las radios utilizan osciladores de bajo coste y bajo rendimiento (uno de los objetivos del diseño de las radios es la reducción de costes mediante el uso de componentes de menor especificación).
Para evitar problemas de interferencia, una vez que la sincronización comienza a degradarse, la radio debe ser retirada del servicio o los servicios afectados por la degradación de la sincronización deben ser apagados inmediatamente. Para mitigar este tipo de escenario de fallo, se puede desplegar un servicio de sincronización basado en la red PTP, en el que las radios del clúster están sincronizadas con un reloj PTP grandmaster con un receptor GPS integrado. Si el GPS del reloj maestro PTP falla o tiene problemas de seguimiento, las radios que están sincronizadas con el reloj maestro permanecerán alineadas en fase con respecto a las radios adyacentes y no tendrán problemas de interferencia. Se pueden desplegar osciladores de alta calidad en el reloj maestro PTP para mantener la alineación de la hora con el UTC durante periodos prolongados y existen escenarios de respaldo basados en el PTP que se pueden incluir en la arquitectura para ayudar a mantener la hora trazable al UTC en escenarios de fallo. El enfoque de los servicios de sincronización basados en la red del reloj maestro PTP es un enfoque muy resistente y rentable que proporciona los beneficios adicionales de la alineación de fase de los grupos de radio en escenarios de fallo del GPS, y lleva el despliegue del GNSS a puntos de presencia centralizados donde la seguridad y la buena línea de visión a la constelación de satélites pueden ser cuidadosamente diseñados.
Fase 1: GPS distribuido, receptores de sincronización GPS integrados en los emplazamientos de macroceldas para aplicaciones de sincronización CPRI
En esta aplicación, la fuente de sincronización es un receptor GPS integrado en la BBU que se encuentra junto con el cabezal de radio (RH), normalmente en la base de la celda. La BBU recupera la sincronización del receptor GPS y la transfiere al RH a través de unos pocos metros de fibra utilizando la interfaz de radio pública común (CPRI), como se ve en la figura A.
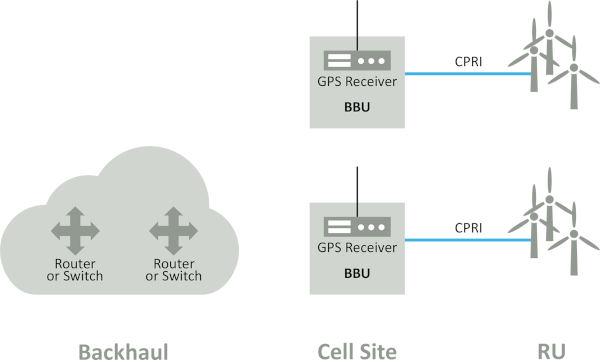 Figura A. Esta figura muestra un receptor de sincronización GPS integrado en la BBU y es un ejemplo de una arquitectura de sincronización GPS distribuida en una arquitectura DRAN. La sincronización se suministra desde la BBU a la radio a través del enlace CPRI.
Figura A. Esta figura muestra un receptor de sincronización GPS integrado en la BBU y es un ejemplo de una arquitectura de sincronización GPS distribuida en una arquitectura DRAN. La sincronización se suministra desde la BBU a la radio a través del enlace CPRI.
Fase 2: Servicios de sincronización basados en la red de origen GPS, relojes grandmaster PTP en los puntos de agregación del cluster de radio para aplicaciones de sincronización CPRI.
En esta aplicación, la BBU está alejada del RH. Las BBU suelen estar "agrupadas" en HUBs conocidos como ubicaciones RAN centralizadas (cRAN) que son puntos de agregación para los clusters RH. La fuente de tiempo puede ser un receptor GPS situado en el HUB de la cRAN con la señal GPS canalizada desde la antena hasta los receptores integrados en las BBUs, o alternativamente, el receptor GPS puede combinarse con un reloj maestro PTP, en cuyo caso se suministra un servicio de sincronización PTP a los esclavos PTP en la BBU. Una vez que la BBU ha recuperado la sincronización del flujo PTP o del receptor GPS, transfiere la sincronización a través del enlace CPRI a los cabezales de radio remotos (RRH). El enlace CPRI en las arquitecturas de servicio 3G y 4G tiene una limitación de distancia de aproximadamente 17 Km. Consulte la figura B que aparece a continuación.
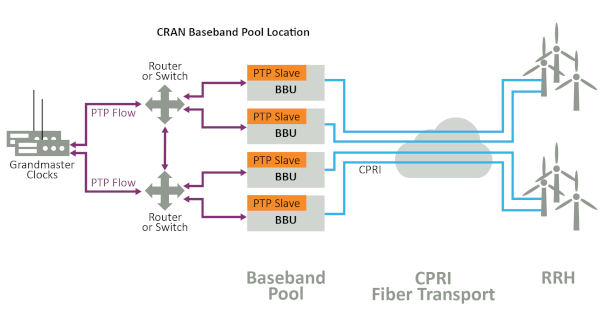 Figura B. Este dibujo representa un PTP grandmaster como fuente de sincronización basada en la red para un clúster de radio que transfiere la hora desde un esclavo PTP en la BBU al clúster de radio a través del enlace CPRI.
Figura B. Este dibujo representa un PTP grandmaster como fuente de sincronización basada en la red para un clúster de radio que transfiere la hora desde un esclavo PTP en la BBU al clúster de radio a través del enlace CPRI.
Fase 3: Servicios de sincronización basados en la red de la fuente GPS, relojes PTP grandmaster en los puntos de agregación del clúster de radio para las aplicaciones de sincronización de Ethernet.
5G requerirá la densificación de las radios y frecuencias adicionales más bajas y altas que 4G, lo que implica un diseño más cuidadoso de la sincronización para evitar el aumento de las interferencias co-canal entre las radios. Al mismo tiempo, la BBU se está desagregando en dos funciones, la unidad distribuida y la unidad centralizada, que pueden virtualizarse, y la temporización basada en CPRI se está trasladando a PTP sobre Ethernet directamente en las radios. Esto supondrá un enorme cambio en las arquitecturas de sincronización: El GPS se trasladará necesariamente a los puntos de agregación de los grupos de radios y el PTP se hará omnipresente en toda la red. Una arquitectura de este tipo requerirá un despliegue de GPS robusto y resistente en lo más profundo de la red y más PTP para proporcionar tanto sincronización a las Unidades de Radio (RU) 5G como respaldo y protección sistemáticos para los relojes GPS.
Sin duda, los servicios 5G dependerán cada vez más de la ingeniería PTP para la resiliencia y la sincronización determinista en toda la red. A medida que las arquitecturas Open RAN ganen impulso y se adopten para los despliegues 5G, los flujos de sincronización PTP terminarán en las radios 5G y ya no será necesario que la DU forme parte de la cadena de sincronización desde reloj grandmaster hasta la radio 5G. Esto se muestra en la Figura C más abajo.
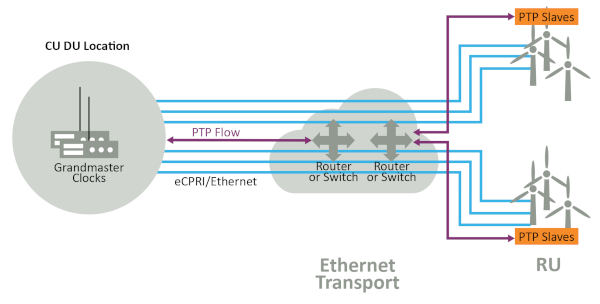 Figura C. Esta ilustración representa un reloj maestro PTP que proporciona la transferencia de tiempo utilizando el protocolo PTP directamente a los esclavos PTP en las radios 5G.
Figura C. Esta ilustración representa un reloj maestro PTP que proporciona la transferencia de tiempo utilizando el protocolo PTP directamente a los esclavos PTP en las radios 5G.
Resumen
5G introduce algunos cambios significativos que abarcan casi todos los aspectos de la arquitectura de la red inalámbrica móvil, incluidas las frecuencias de RF utilizadas, el transporte de datos I/Q de radio, la arquitectura de transporte y la forma de sincronizar la red. La dependencia del GPS, vista en los sistemas 3G y 4G, está cambiando a PTP debido a las nuevas preocupaciones de seguridad y fiabilidad, la necesidad de una sincronización garantizada extremadamente ajustada a las radios 5G sin línea de visión a los sistemas de satélite, y la preferencia del operador por la alineación de fase garantizada y el control de los servicios de sincronización críticos.
Una sincronización más determinista y estricta que permita los servicios de banda ancha omnipresentes y siempre activos será el sello de las redes 5G.
Autor: Jim Olsen, Ingeniero técnico superior de aplicaciones en Microchip Technology Inc.



