
En la parte 1 se describieron los objetivos del entrelazado, se analizaron los errores que crean artefactos de entrelazado y se presentó la gama de opciones de conversión analógica-digital (ADC) de 40 GSPS utilizando el AD9084. En la parte 2 se presentó una opción de muestreo en cuadratura directa, junto con un mecanismo de corrección de cuadratura en detalle. En la parte 3 se presentan métodos para proporcionar opciones de entrelazado temporal.
En la figura 1 se muestra una representación visual del procesamiento de señal digital (DSP) integrado descrito en la parte 1. La distribución del reloj incluye disposiciones para invertir internamente los relojes a canales ADC adyacentes dentro del dispositivo. La opción más sencilla de intercalación temporal consiste en descargar todos los datos de dos canales a la frecuencia de muestreo completa. Desafortunadamente, esta opción requiere unir los datos de dos canales dentro de la FPGA o ASIC a la frecuencia máxima, antes del procesamiento. El consumo de energía y la sobrecarga de esta opción la hacen menos deseable por sí sola. Una opción alternativa de intercalación temporal es la que aprovecha el filtrado de datos dentro del DSP integrado, como la opción de muestreo en cuadratura.

Figura 1. La mitad de una sección de la ruta de recepción MxFE, que muestra dos ADC y un DSP integrado.
La preocupación por la potencia de la velocidad de datos completa crea la necesidad de una opción que entrelace temporalmente los ADC adyacentes, utilice DSP integrado y descargue datos a velocidades reducidas aprovechando la conversión digital descendente (DDC). A continuación, se describió cómo resolver los límites de Nyquist del ADC aprovechando la información de fase. Un valor único que se muestra en estos conceptos es la opción de intercambiar el número de canales por la frecuencia de muestreo sin aumentar las velocidades de datos digitales, pero manteniendo el uso de las capacidades DSP integradas programables.
Segmentos intercalados en el tiempo
Imaginemos que se reducen los datos del ADC a muestras de datos pares e impares. Cada flujo de datos tiene la mitad de la frecuencia de muestreo y contiene cada dos muestras desplazadas una. Esto es lo que ocurre cuando se intercalan segmentos del ADC. Cada segmento tiene la mitad de la frecuencia y contiene cada dos muestras. El enfoque tradicional consiste en unir esos datos a la frecuencia de muestreo completa. Un enfoque alternativo consiste en utilizar la información de fase entre los dos segmentos, lo que permite resolver las zonas de Nyquist sin aumentar las velocidades de datos digitales. La figura 2 introduce el concepto de segmentos intercalados visualizados en el dominio de la frecuencia.
Por ejemplo, veamos un ADC entrelazado en el tiempo 2×:
![]()
Los sub-ADC proporcionan las muestras pares e impares.![]()
![]()
Si interpretamos las señales del sub-ADC en el dominio de la frecuencia, podemos relacionarlas con la señal de velocidad completa deseada utilizando las ecuaciones 4 y 5.

Cada señal sub-ADC consta de dos señales de aliasing procedentes de zonas Nyquist opuestas. La polaridad del aliasing es diferente para muestras pares e impares. Podemos aprovechar este hecho para separar la primera y la segunda zona Nyquist en el posprocesamiento.

Figura 2. Interpretación de cortes intercalados en el dominio de la frecuencia.
Intercalación temporal seguida de filtros FIR
Trabajando con información de fase, se puede crear un método para resolver una señal Nyquist de primera o segunda frecuencia de corte. La figura 3 ilustra un enfoque para la solución. Reconozca que el retraso temporal es

Figura 3. Diferencia de fase entre cortes intercalados.
En la salida del ADC, hay una diferencia de retardo temporal entre los dos segmentos de medio periodo de reloj. Esto da como resultado una fase lineal frente a la frecuencia. Si luego se aplica un filtro de retardo fraccional de media muestra en la salida a un canal ADC, se compensa la fase en el primer Nyquist, pero en el segundo Nyquist hay un cambio de fase entre los segmentos intercalados. Esta es la propiedad que se debe aprovechar con el DSP integrado del ADC una fase lineal frente a la frecuencia. Por lo tanto, en la salida del ADC, hay una fase lineal frente a la frecuencia de entrada, donde la pendiente se basa en el retardo de tiempo de la mitad del periodo de la tasa de corte. La diferencia de fase tanto de la frecuencia fundamental como de la frecuencia imagen se muestra en la mitad inferior de la figura 3 en comparación con la frecuencia de entrada.
En la salida del ADC, aunque vemos la pendiente de fase frente a frecuencia, no hay suficiente información con la que trabajar. Si añadimos un retardo fraccional de ½ muestra a uno de los segmentos del ADC, surge una propiedad importante. El resultado es que las salidas de los ADC están en fase si la frecuencia de entrada está en el primer Nyquist y tienen una diferencia de fase de 180° si la señal está en el segundo Nyquist. Esta propiedad permite un método para sumar las señales y crear un método de cancelación de la zona de Nyquist.
Este método de suma es útil cuando la señal de interés no está cerca de fS /2. Para las señales que cruzan el límite fS /2, se necesita un enfoque alternativo. Si se añade una transformada de Hilbert o un desplazamiento de 90° al filtro digital fraccionario, entonces el delta de fase está en cuadratura en las salidas del filtro. El resultado de la cuadratura también tiene una inversión de fase entre I y Q en fS /2 y puede utilizarse como entradas de cuadratura para un DDC complejo, lo que hace que esta opción sea análoga a la opción de muestreo en cuadratura descrita en la parte 2. Esto se puede ver en la figura 4.
Corrección de imagen para intercalación temporal
En la sección anterior se analizan varias formas en las que se pueden combinar las salidas de dos ADC intercalados en el tiempo para lograr una señal de velocidad completa 2×, suponiendo que ambos ADC estén perfectamente emparejados. Sin embargo, en la práctica, habrá un desajuste de ganancia, fase y retardo entre los ADC y las ramas del divisor de potencia anterior. Al igual que con la técnica de muestreo en cuadratura, la discrepancia entre las rutas del ADC se puede corregir utilizando una estructura de filtro semicomplejo en la salida del ADC o, alternativamente, sumando las salidas de los filtros completos complejos de un par de canales DDC.
Como se ve en la figura 5, el sistema de intercalación temporal puede modelarse como un divisor de potencia ideal que alimenta dos rutas de señales analógicas con funciones de transferencia diferentes, donde H0 (ω) representa la función de transferencia de la ruta que captura las muestras pares, y H1 (ω) representa la función de transferencia de la ruta que captura las muestras impares. Las rutas de señal pares e impares se denominarán ruta 0 y ruta 1.
Figura 4. Se muestran dos opciones de intercalación temporal que aprovechan los filtros integrados. A la izquierda, si se añade un retardo de media muestra en una de las secciones de intercalación, las señales del segundo Nyquist estarán en fase y las señales del segundo Nyquist estarán fuera de fase. A la derecha, si se incluye una transformada de Hilbert en los coeficientes FIR, el resultado es que las señales están en cuadratura en la salida FIR con un cambio de fase en los límites de Nyquist, similar al muestreo en cuadratura descrito en la Parte 2.

Figura 5. Un modelo de intercalación temporal.
Al igual que la QEC, la corrección por intercalación temporal es una forma relativa de ecualización. Por ejemplo, en la figura 6, la ruta 0 puede considerarse ideal, y la ruta 1 puede equipararse a la ruta 0. Por lo tanto, la respuesta de la ruta 1 se puede modelar como la combinación de (a) un retardo nominal de ½ muestra, (b) la respuesta común de la ruta 0 y (c) una respuesta de desajuste o delta de la ruta 1 en relación con la ruta 0.

Figura 6. Un modelo de intercalación temporal relativa en términos de un retardo nominal de ½ muestra H0,5 (ω) y una respuesta de desajuste HΔ (ω).
Utilizando identidades trigonométricas simples, la salida de la ruta 1 se puede descomponer en una suma que incluye términos coseno retardados.
![]()

En ausencia de desajuste entre la ruta 0 y la ruta 1 (es decir, HΔ (ω) = 1 ), las salidas ideales de la configuración de muestreo en cuadratura se pueden definir como:
![]()

La figura 7 muestra el resultado de estimular este modelo de intercalación temporal relativa con una entrada sinusoidal x(t) = cos (ω0 t). El retardo nominal de ½ muestra H0,5 (ω) y la respuesta de desajuste HΔ (ω) = AΔ (ω) e(jθΔ(ω)) modifican la amplitud y la fase de la señal de 1 ruta, tal y como se muestra.

Figura 7. Estimulación del modelo de intercalación temporal con una entrada sinusoidal.
Por lo tanto, para una señal sinusoidal u otra señal de banda estrecha centrada en la frecuencia ω0 , las salidas reales se pueden escribir en términos de las salidas ideales. La configuración de intercalación temporal se puede considerar como un sistema lineal 2 × 2 que genera un error de intercalación temporal. La corrección del error de intercalación temporal se realiza invirtiendo este sistema lineal 2 × 2 para recuperar las salidas ideales x0 (t) y x1 (t), como se muestra en la figura 8. Tenga en cuenta que, para el caso de tono único que se describe en este ejemplo, la solución de corrección de errores que se muestra en la figura 8 es una de las muchas soluciones posibles, en las que las soluciones varían ajustando un filtro en relación con el otro. La solución de corrección de errores se vuelve única cuando se intenta corregir simultáneamente señales en múltiples zonas de Nyquist, pero esa solución única está fuera del alcance de este artículo.
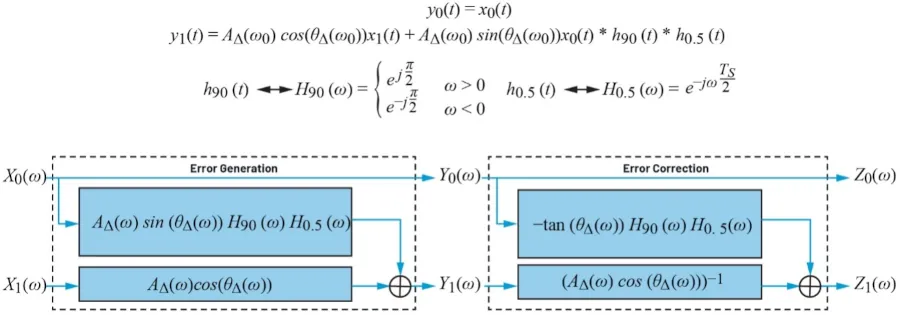
Figura 8. Modelo de intercalación temporal relativa que muestra tanto la generación de errores como la corrección de errores a través de una estructura de filtro semicompleja.
El filtro cruzado que se extiende desde la ruta 0 a la ruta 1 debe implementar un retardo de media muestra (H0,5 (𝜔 )) y un desplazamiento de fase de 90° (H90 (𝜔 )).
Este modelo de generación de errores de intercalación temporal tiene similitudes con el modelo de generación de errores de muestreo en cuadratura, pero hay una diferencia significativa. Con un estímulo de tono único, el error de muestreo en cuadratura se puede modelar y corregir utilizando filtros de valor real de un solo toque. En otras palabras, la corrección solo requiere una corrección de ganancia en cada uno de los dos filtros de valor real. Sin embargo, la corrección de intercalación temporal requiere una corrección de fase y, por lo tanto, requiere un filtro cruzado de múltiples toques que se extienda desde la ruta 0 a la ruta 1.
Con la topología dada, las salidas z0 [n] y z1 [n] representan las muestras pares e impares, respectivamente, de una señal entrelazada 2× muestreada al doble de la velocidad. La salida entrelazada z[n] se construye de la siguiente manera:

Sin embargo, tal y como se ha descrito en secciones anteriores, el retardo de ½ muestra combinado con una transformada de Hilbert se puede utilizar opcionalmente para transformar z0 [n] y z1 [n] en una representación en cuadratura. La figura 9 muestra la cascada de corrección de intercalación temporal mediante los filtros G0 (ω) y G1 (ω), y la transformación a cuadratura mediante Gq (ω), lo que da como resultado salidas de cuadratura z[n] = zi [n] + jzq [n].

Figura 9. Combinación de la corrección de intercalación temporal, para corregir el desajuste analógico entre la ruta 0 y la ruta 1, con una transformada de Hilbert para convertirla en una representación de señal en cuadratura.
Las etapas de filtro en cascada se pueden fusionar en una única estructura de filtro semicomplejo incluyendo la transformación de cuadratura en la primera etapa.

Ahora, con una señal de salida en cuadratura corregida, el análisis proporcionado en secciones anteriores se puede aplicar para diferir la corrección de la salida del ADC, utilizando el filtro programable (PFILT), a la salida del DDC, utilizando el filtro complejo (CFIR).
En la figura 10 se muestran las mediciones que comparan el entrelazado temporal con el entrelazado en cuadratura cuando se utiliza PFILT o CFIR para la corrección de errores respectiva. Los resultados muestran que los errores son aproximadamente iguales en magnitud tanto para el entrelazado temporal como para el entrelazado en cuadratura, y que CFIR ofrece un mejor rendimiento en ambos casos.

Figura 10. Rechazo de imagen medido comparando el entrelazado temporal y en cuadratura.
Obsérvese que los errores son aproximadamente los mismos y que, en ambos casos, la corrección CFIR ha mejorado el rendimiento debido a que el CFIR funciona a la velocidad decimada y las tomas del filtro tienen un período efectivo más largo.
Como se describe en la parte 2, los errores tras la corrección con el PFILT están limitados por la ondulación de frecuencia causada por las largas líneas de transmisión y el desajuste de impedancia de los divisores de RF a los dos canales ADC. La respuesta del PFILT puede acercarse a resultados similares a los de la respuesta CFIR tras corregir los problemas mencionados anteriormente.
Comparación de opciones de intercalación
Se han descrito múltiples opciones de intercalación. A continuación, se justifica una comparación de las opciones. Las mediciones de la figura 10 muestran que el rendimiento de rechazo de imagen es prácticamente el mismo para la intercalación en cuadratura que para la intercalación en tiempo, por lo que la decisión sobre cuál es la mejor opción se reduce a otras consideraciones prácticas de aplicación.
Descarga a velocidad completa frente a DSP integrado
En los casos en los que se desean 40 GSPS completos de datos, esto es posible y se puede lograr con las últimas soluciones MxFE. La limitación práctica es la absorción del aumento de datos y, a continuación, la calibración y la reformulación de un flujo de datos de 40 GSPS antes del procesamiento. En muchos casos, es muy conveniente seguir supervisando un ancho de banda Nyquist completo de 20 GHz, pero utilizando el DSP integrado para reducir la sobrecarga del backend digital. Las opciones que utilizan el DSP integrado han sido la mayor parte de las descripciones, sin embargo, la descarga de datos a velocidad completa sigue siendo una opción realista si se desea.
Intercalación temporal frente a intercalación en cuadratura
El entrelazado en cuadratura tiene dos ventajas:
• Uso de la FFT integrada en modo complejo
• La entrada al híbrido en cuadratura puede considerarse como un amplificador equilibrado. Las reflexiones del ADC se transmitirán al puerto de terminación, lo que proporcionará una mejor adaptación de impedancia de banda ancha.

El principal inconveniente del muestreo en cuadratura son las limitaciones del rango de frecuencia de los híbridos en cuadratura disponibles en el mercado. Existen componentes comerciales que admiten un rango de 2 GHz a 18 GHz, lo que históricamente es un ancho de banda amplio. Si se desea un ancho de banda aún mayor, existen divisores de potencia resistivos que pueden extenderse a un rango de frecuencia más bajo.
Corrección PFILT frente a CFIR
Aunque tanto el PFILT como el CFIR del AD9084 admiten la corrección de intercalación temporal, cada uno tiene sus ventajas e inconvenientes. El PFILT funciona a la frecuencia de muestreo completa del ADC, lo que permite corregir amplios anchos de banda con un único conjunto de coeficientes de filtro y también permite el uso completo de la funcionalidad DSP integrada. Sin embargo, el CFIR admite respuestas impulsivas de mayor duración, lo que se traduce directamente en un mejor rendimiento en esta aplicación. La tabla 1 ofrece un resumen de las ventajas e inconvenientes.
Conclusión
En esta serie de tres partes, se han descrito métodos prácticos para permitir el primer muestreo de Nyquist a través de 20 GHz con ADC disponibles en el mercado. En la parte 1, se presentaron los objetivos y se proporcionó una visión general de las opciones. En la parte 2, se describió en detalle el muestreo directo en cuadratura, junto con las deficiencias y correcciones necesarias. La parte 3 concluyó con opciones de intercalación temporal y una comparación de las opciones disponibles. A lo largo de la serie, se han proporcionado los fundamentos técnicos para mostrar los resultados obtenidos, además de las mediciones finales.
Se ha dedicado mucho esfuerzo a mantener el rango dinámico y el rendimiento del ruido, al tiempo que se aumentaban las frecuencias de muestreo. Los ADC AD9084 de 20 GSPS ofrecen el mejor rendimiento de su clase con anchos de banda de entrada de hasta 18 GHz. El rendimiento de esos ADC se ha mantenido, al tiempo que se ha intercalado un paso más hasta 40 GSPS y se han proporcionado opciones que el usuario puede elegir en función de los objetivos de la aplicación.
Trabajo futuro
El trabajo futuro se centrará principalmente en las actualizaciones de software y firmware que permitan una integración optimizada de las opciones de intercalación en los sistemas finales. Se incorporará la modificación de la placa de evaluación para optimizar los divisores de RF junto a los ADC.
Agradecimientos
Los autores desean expresar su agradecimiento a los equipos de diseño. La combinación de las frecuencias de muestreo del ADC, el ancho de banda de entrada y el DSP integrado sentó las bases para desarrollar los conceptos analizados. También queremos agradecer a los diseñadores de ADC y a Analog Devices su larga trayectoria, que ha allanado el camino durante décadas de trabajo de diseño y ha culminado en el primer muestreo Nyquist de 20 GHz y alto rango dinámico.
Referencias
Ali, Ahmed. Convertidores de datos de alta velocidad. IET, agosto de 2016.
Kester, Walt. The Data Conversion Handbook. Analog Devices, Inc., 200.
Manganaro, Gabriele. Convertidores de datos avanzados. Cambridge University Press, 2012.
Acerca de los autores
Ian Beavers es ingeniero de aplicaciones de campo y director de laboratorios de clientes del equipo de sistemas aeroespaciales y de defensa de Analog Devices, con sede en Durham, Carolina del Norte. Trabaja en la empresa desde 1999. Ian cuenta con más de 25 años de experiencia en la industria de los semiconductores. Ian es licenciado en Ingeniería Eléctrica por la Universidad Estatal de Carolina del Norte y tiene un máster en Administración de Empresas por la Universidad de Carolina del Norte en Greensboro.
Peter Delos es responsable técnico del Grupo Aeroespacial y de Defensa de Analog Devices en Greensboro, Carolina del Norte. Obtuvo su licenciatura en Ingeniería Eléctrica en Virginia Tech en 1990 y su máster en Ingeniería Eléctrica en NJIT en 2004. Peter cuenta con más de 30 años de experiencia en el sector. Ha dedicado la mayor parte de su carrera al diseño de sistemas analógicos y de RF avanzados a nivel de arquitectura, PWB e IC. Actualmente se centra en la miniaturización de diseños de receptores, generadores de formas de onda y sintetizadores de alto rendimiento para aplicaciones de matriz en fase.
Brian Reggiannini es ingeniero principal sénior en diseño de sistemas. Ha diseñado, implementado y dado soporte a calibraciones a nivel de sistema para varias generaciones de productos transceptores inalámbricos de Analog Devices. Sus intereses técnicos incluyen el procesamiento de señales, el aprendizaje automático, los sistemas integrados y los sistemas que involucran componentes analógicos asistidos digitalmente. Brian obtuvo los títulos de Sc.B., Sc.M. y Ph.D. por la Universidad de Brown en 2007, 2009 y 2012, respectivamente.
Connor Bryant es ingeniero de aplicaciones de sistemas en Analog Devices y trabaja en la unidad de negocio aeroespacial y de defensa en Durham, Carolina del Norte. Se incorporó a ADI en 2023. Actualmente se centra en el diseño y análisis de cadenas de señales mixtas de RF. Obtuvo su licenciatura en Ingeniería Eléctrica en la Universidad Estatal de Carolina del Norte en 2022 y su máster en Ingeniería Eléctrica en la misma universidad en 2023.






