

The CAN bus (CAN = Controller Area Network) offers excellent features with its operating model of both producer and consumer of data messages. Each type of data message has an ID (an 11-bit or 29-bit identifier code). The ID reveals the message content to other participants. The ID value also has an associated priority: a lower number indicates higher priority. All participants on a CAN bus can read all messages and can send messages. If two participants send a message simultaneously, priority is used to resolve the issue. The participant sending the lower-priority message is taken out of the way and sends their message later
 How it works:
How it works:
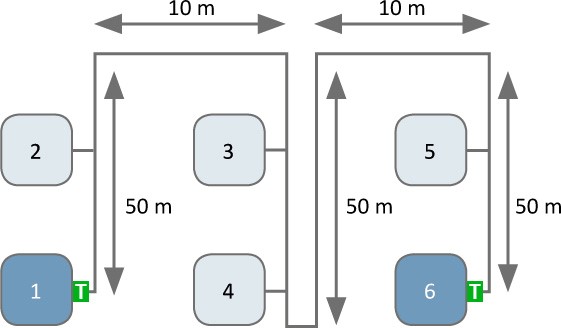
The central element in CAN is that all participants on the bus see the same data bit on the bus at the same time.
This places a limitation on the maximum speed and maximum length of a CAN bus at any one time because the electrical signal in a copper wire travels at 200,000 km/s, or 300,000 km/s in a vacuum. This corresponds to 20 cm/ns or 30 cm/ns.
By restructuring the CAN bus from bus to star, the distance the signals have to travel can be shortened, thus increasing the extension of the CAN bus.
The lines coupled by the CAN Repeater are independent electrical segments that must be properly terminated (at each point of the cable with a resistance of 120 ohms) in terms of signal to avoid signal reflections.
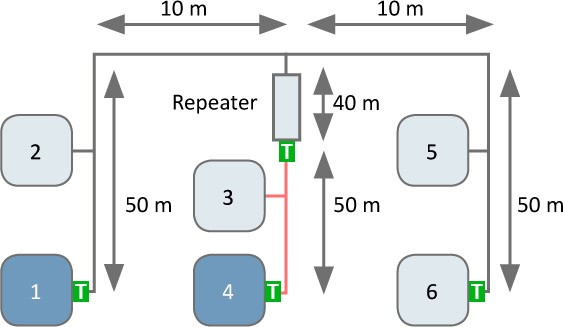 Depending on the transceiver's output capabilities, dividing CAN systems into several CAN cable segments, connected via CAN repeaters, increases the maximum number of devices on the bus. Using repeaters does not affect the real-time behavior of a system because, in terms of transmission behavior, it corresponds to a network consisting only of lines.
Depending on the transceiver's output capabilities, dividing CAN systems into several CAN cable segments, connected via CAN repeaters, increases the maximum number of devices on the bus. Using repeaters does not affect the real-time behavior of a system because, in terms of transmission behavior, it corresponds to a network consisting only of lines.

